Simulácia riadenia TITO systému STC regulátorom s kompenzátorom K4 |
Riadenie dvojrozmerného (TITO - Two Inputs Two Outputs) systému pomocou STC regulátora vychádza z nasledujúcej principiálnej schémy:

Táto schéma znázorňuje zapojenie uzavretého regulačného obvodu, v ktorom blok "Regulovaný systém" má v tomto prípade dva vstupy, dva výstupy a nemá poruchu v. K tomuto systému je paralelne zapojený blok priebežnej rekurzívnej identifikácie, ktorý v každom kroku riadenia odhaduje parametre riadeného TITO systému a tie zapisuje do bloku "Výpočet parametrov regulátora". Vypočítané parametre regulátora q sa v bloku "Regulátor" použijú na výpočet akčného zásahu, teda výstupu regulátora. To prebieha cyklicky pre každý krok riadenia.
Pričom STC regulátor s kompenzátorom K4 má nasledovnú štruktúru:

Simulačná schéma riadenia TITO systému s takým to STC regulátorom je potom zostavená v jazyku Simulink z blokov knižnice STCLIB podľa nasledujúceho obrázku:

V tejto simulačnej schéme blok STC regulátora "PPK_TITO_a" obsahuje blok "Výpočet parametrov regulátora" a "Regulator" znázornené v predošlej schéme.
Spustením simulácie tejto schémy v jazyku Simulink pri zadaných nastaveniach blokov získajú sa priebehy jednotlivých veličín obvodu, ktoré sa znázorňujú v grafoch.
|
Príklad riadenia TITO systému STC regulátorom
Podmienky simulácie:
Riadený systém je popísaný maticami:


• Perióda vzorkovania Tvz = 1 [s].
• Doba trvania simulácie Stop_Time = 200 [s].
• Diagonálna matica M(z-1), ktorou sa rozmiestnia póly STC regulátora, je:

kde:
• Počiatočný odhad parametrov ARX modelu TITO systému pre RMNŠ je:

• Použitá je identifikačná metóda so smerovým zabúdaním:
C(0) = 103, j(0) = 1, l(0) = 0.001, u(0) = 10-6, r(0) = 0.99
• Obmedzenie akčného zásahu regulátora je +10 a -10.
• Riadiaca hodnota w1(k), w2(k) je generovaná so skokovými zmenami a so sínusovým priebehom (ako je zrejmé z obrázkov simulácií).
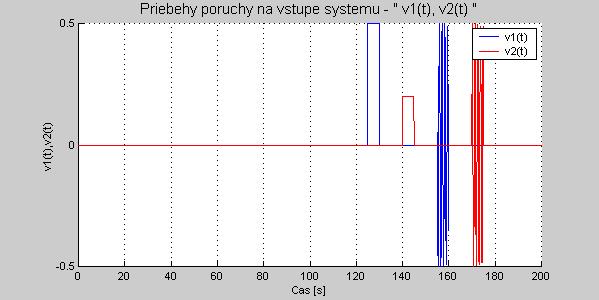
• Na vstup systému pôsobí skoková a vysokofrekvenčná sínusová porucha podľa obrázka.
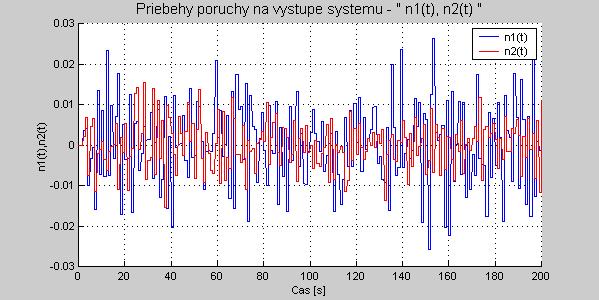
• A na výstupe systému pôsobí aditívny, dynamikou systému filtrovaný, biely šum zobrazený na obrázku.
• V k = 180 boli zmenené parametre systému: b2 z 0.4 na hodnotu 0,5 a b3 z 0.9 na 0,8 a b6 z hodnoty 0,2 na 0.25.
|
|
Získané priebehy:



|
|
Nasledujúce formuláre umoňňujú zmeniť niektoré parametre simulácie a simuláciu znova spustiť. Jej výsledky sa zobrazia na vyššie zobrazených grafoch.
|
|
|
V bloku STC regulátora možno nastaviť parametre matice predpísaných pólov M a to tak, že v hranatých zátvorkách do vstupného poľa vložíte 8 koeficientov ( [m1 m2 ... m8] ). Matica M je v tvare:
 |
|
|
V bloku diskrétneho systému sa matice A a B zadávajú pomocou 8-ich koeficientov zadaných v hranatých zátvorkách ( [ a1 a2 ... a8 ] , [ b1, b2, ... b8 ] ). Matice A a B sú:


V nastavenom čase simulácie sa zmenia parametre v maticiach A, B na hodnoty uvedené v maticiach určujúcich koeficienty A, B po zmene parametra.
|
|
|
| Perióda vzorkovania platí pre celú simulačnú schému. |
|
|
Parametrom "Rád identifikovaného modelu" možno určiť, či sa budú identifikovať len parametre na diagonále matice A, alebo všetky.
"Typ identifikačnej metódy" môže byť: LSM ez - RMNŠ s exponenciálnym zabúdaním, alebo LSM až s adaptívnym smerovým zabúdaním.
On1 sa zadáva v hranatých zátvorkách a je v tvare: [ a1 a2 a3 a4 b1 b2 b3 b4 ], tieto koeficienty predstavujú prvý riadok matíc A, B uvedených vyššie.
On2 sa zadáva podobne: [ a5 a6 a7 a8 b5 a6 a7 a8 ], ako druhý riadok matíc A, B. |
|
|
Posledný priebeh vstupnej poruchy:
Vnútorná schéma bloku vstupnej poruchy - blok "porucha":
|
|
|
Posledný priebeh výstupnej poruchy:
Vnútorná schéma bloku výstupnej poruchy - blok "sum+porucha":
 Blok - "System TITO" je automaticky nastavený podľa nastavenia matíc A pred a po zmene parametra, pričom matica B je jednotková. Tento systém tu slúži ako filter. Ak je táto porucha pripojená k výstupu riadeného systému, identifikuje sa ARX model systému.
Blok - "System TITO" je automaticky nastavený podľa nastavenia matíc A pred a po zmene parametra, pričom matica B je jednotková. Tento systém tu slúži ako filter. Ak je táto porucha pripojená k výstupu riadeného systému, identifikuje sa ARX model systému.
Teraz môžete spustiť nový simulačný výpočet modelu riadenia TITO systému STC regulátorom stlačením tlačidla "Spust výpocet". |
|
|