| Title |
Cit. |
Advanced Generalized Modelling of Classical Inverted Pendulum Systems / Slávka Jadlovská ... [et al.] - 2015. In: Advances in Intelligent Systems and Computing. - Switzerland : Springer, 2015 Vol. 316, no. 1(2015), p. 255-264. - ISSN 2194-5357
2015 [1] MACHADO, J.A.T., LOPES, A.M. The N-link pendulum: Embedding nonlinear dynamics into the multidimensional scaling method In: Chaos, Solitons and Fractals Vol. 89 (2015), p. 130-138 ISSN: 0960-0779
2017 [1] LOPES, A.M., MACHADO, Tenreiro J.A. Dynamics of the N-link pendulum: a fractional perspective In: International Journal of Control Vol. 90, no. 6 (2017), p. 1192-1200 ISSN: 0020-7179 |
2 |
A complex overview of modeling and control of the rotary single inverted pendulum system / Slavka Jadlovska, Jan Sarnovsky - 2013. In: Advances in Electrical and Electronic Engineering. Vol. 11, no. 2 (2013), p. 73-85. - ISSN 1336-1376
2014 [1] QIN, Haohua - SHAO, Wei - GUO, Lantian Research and Verification on Swing-Up Control algorithm of Rotary Inverted Pendulum In: CCDC 2014 : 26-th Chinese Control and Decision Conference : 31 May - 2 June 2014, Changsha P. 4941-4944 ISBN: 978-1-4799-3706-6
2015 [3] BABU, Jithin - VARGHESE, Elizabeth Stabilization of Rotary Arm Inverted Pendulum using State Feedback Techniques In: International Journal of Engineering Research & Technology Vol. 4, no. 7 (2015), p. 563-567 ISSN: 2278-0181
2015 [3] SRIKANTH, Kavirayani, NAGESG G.V., Kumar Rotary inverted pendulum control and the impact of time delay on switching between stable and unstable states with enhanced particle swarm optimization In: International Journal of Computer and Communication System Engineering: IJCCSE Vol. 2, no. 4 (2015), p. 569-574 ISSN: 2312-7694
2015 [3] SRIKANTH, K. Energy efficiency analysis with delayed control signal for a typical nonlinear dynamic system In: Proceedings of National Conference on Electrical Power and Energy Systems: EPES - 15 : May 8-9 2015, Visakhapatnam, Andra Pradesh
2016 [1] SRINKATH, K, RAO, J.S., KUMAR, G.V.N. Stabilization at upright equilibrium position of Rotary Inverted Pendulum using particle swarms with constrained optimization In: WCI 2015 : IEEE Workshop on Computational Intelligence : Theories, Applications and Future Directions : Kanpur, 14-17 December, 2015 art. no. 7495542 ISBN: 978-146738215-1
2016 [3] ELMASRUB, Hussein Ahmed - DAO ELGODBAN, Abulghasem - HASSAN ZAYED, Mohamed The Inverted Pendulum in Nonlinear Control Theory In: ACECS 2016 : 3rd International Conference on Automation, Control, Engineering and Computer Science : Hammarnet, March 20-22, 2016 P. 921-925 ISSN: 2356-5608
2016 [3] BUI, Hoang Dong Deploying state space control to regulate an inverted rotary pendulum with non-zero input In: International Research Journal of Engineering and Technology Vol. 3, no. 11 (2016), p. 9-14 ISSN: 2395-0072
2016 [3] NEETHA, R Design of controllers for a non-linear system using pole-placement and linear quadratic regulator technique to solve servo and regulatory problem In: International Journal of Engineering and Applied Sciences Vol. 3, no. 11 (2016), p. 57-61 ISSN: 2394-3661
2016 [1] HAMZA, Fatihu Mukhtar et al. Simulation Studies for Stabilization Control of Furuta Pendulum System Using Cascade Fuzzy PD Controller In: International Journal of Simulation: Systems, Science and Technology Vol. 17, no. 35 (2016), p. 12.1-12.9 ISSN: 1473-8031
2017 [1] KAVIRAYANI, Srikanth - KUMAR, Gv Nagesh Flower pollination for rotary inverted pendulum stabilization with delay In: Telkomnica Vol. 15, no. 1 (2017), p. 245-253 ISSN: 1693-6930
2017 [1] GHOMMAN, Jawhar - CHEMORI, Ahmed Adaptive RBFNN finite-time control of normal forms for underactuated mechanical systems In: Nonlinear Dynamics Vol. 90, no. 1 (2017), p. 301-315 ISSN: 0924-090X
2017 [3] ODILON, S. et al. Controle preditivo com garantia de estabilidade aplicado em um pendulo invertido In: SBAI 2017 : 13th Simpósio Brasileiro de Automacao Inteligente : Porto Alegre, 1-4 October, 2017 P. 2051-2056 ISSN: 2175-8905 |
12
|
Modelling of Classical and Rotary Inverted Pendulum Systems - a Generalized Approach / Slávka Jadlovská, Ján Sarnovský - 2013. In: Journal of Electrical Engineering. Roč. 64, č. 1 (2013), s. 12-19. - ISSN 1335-3632
2014 [3] JUNEJA, Mudita - TIWARI, Sheela Reduced Order Modeling of Triple Link Inverted Pendulum Using Particle Swarm Optimization Algorithm In: ICAET- 2014 : proceedings of International Conference on Advances in Engineering and Technology : 24-25 May, 2014, Roorkee P. 160-164 ISBN: 978-1-63248-028-6
2014 [3] ANTONIO-CRUZ, Mayra et al. Modeling, Computer Aided Design, and Construction of a Furuta Pendulum Test-Bed In: Research in Computing Science Vol. 83, no. (2014), p. 133-143 ISSN: 1870-4069
2015 [1] ANTONIO-CRUZ, M. et al. Modeling, simulation, and construction of a furuta pendulum test-bed In: CONIELECOMP 2015 : 25th International Conference on Electronic, Communications and Computer : Cholula, February 25-27, 2015 P. 72-79 ISBN: 978-147997436-8
2014 [1] CRUZ, Antonio, M. et al. Modeling and Construction of a Furuta Pendulum Prototype In: ICMEAE 2014 : International conference on mechatronics, electronics, and automotive engineering : proceedings : 18-21 November 2014, Cuernavaca P. 98-103 ISBN: 978-1-4799-4223-7
2015 [1] JUNEJA, Mudita - NAGAR, S. K. Comparative Study of Model Order Reduction Using Combination of PSO with Conventional Reduction Techniques In: ICIC : International Conference on Industrial Instrumentation and Control : Pune, May 28-30, 2015 P. 406-411 ISBN: 978-1-4799-7165-7
2016 [3] HAMZA, Mukhtar Fatihu et al. Application of Kane's Method for Dynamic Modeling of Rotary Inverted Pendulum System In: MNTMSim 2016 : First International Conference on Micro and Nano Technologies, Modeling and Simulation : 1-3 March 2016, Kuala Lumpur, Malaysia P. 27-32 ISBN: 978-1-5090-2406-3
2017 [1] HAMZA, Mukhtar Fatihu et al. Simulation Studies for Stabilization Control of Furuta Pendulum System Using Cascade Fuzzy PD Controller In: International Journal of Simulation Systems, Science and Technology Vol. 17, no. no. 35 (2017), p. 12.1-12.9 ISSN: 1473-8031
2017 [1] WADI, A., LEE, J.H., ROMDHANE, L. Dynamic Analysis of the Tited Furuta Pendulum In: MATEC Web of Conferences : IC4M 2017 : 2nd International Conference on Mechanical Manufacturing, Modeling and Mechatronics : Belgium, 24-26 February, 2017 Art. no. 02011 ISSN: 2261-236X
2017 [3] KAFETZIS, Ioannis - MOYSIS, Lazaros Inverted Pendulum: A system with innumerable applications In: 9th international Week Dedicated to Maths 2017 : Thessaloniki, 15-19 March, 2017 P. 381-392 ISBN: 978-960-89672-8-1
2017 [1] KONIGSMARKOVA, J., SCHLEGEL, M. Identification of n-link inverted pendulum on a cart In: PC 2017 : proceedings of the 21st International Conference on Process Control : Štrbské Pleso, June 6-9, 2017 P. 42-47 ISBN: 978-153864011-1
|
10 |
Application of the state-dependent Riccati equation method in nonlinear control design for inverted pendulum systems / Slávka Jadlovská, Ján Sarnovský - 2013. In: SISY 2013 : IEEE 11th International Symposium on Intelligent Systems and Informatics : proceedings : Subotica, Serbia, September 26-28, 2013. - Subotica : IEEE, 2013 P. 209-214. - ISBN 978-1-4799-0305-4
2014 [3] FONG, Teng T., JAMALUDIN, Z., ABDULLAH, L. System identification and modelling of rotary inverted pendulum In: International Journal Intelligent Systems and Applications Vol. 6, no. 6 (2014), p. 2342-2352 ISSN: 2231-1963
2014 [1] ARBO, M., RAIJMAKERS, P.A., MLADENOV, V.M. Application of Neural Networks for Control of a Double Inverted Pendulum In: 12th Symposium on Neural Network Applications in Electrical Engineering NEUREL 2014 : Proceedings : Belgrade, Serbia : 25-27 November 2014 P. 89-92 ISBN: 978-1-4799-5888-7
2016 [3] FONG, Teng T. et al. Design and Analysis of Linear Quadratic Regulator for a Non-linear Positioning System In: Applied Mechanics and Materials Vol. 761 (2016), p. 227-232 ISSN: 1662-7482
2017 [1] SHARAFIAN, A., GHASEMI, R. Stable state dependent Riccati equation neural observer for a class of nonlinear systems In: International Journal of Modelling, Identification and Control Vol. 28, no. 3 (2017), p. 256-270 ISSN: 1746-6172 |
4 |
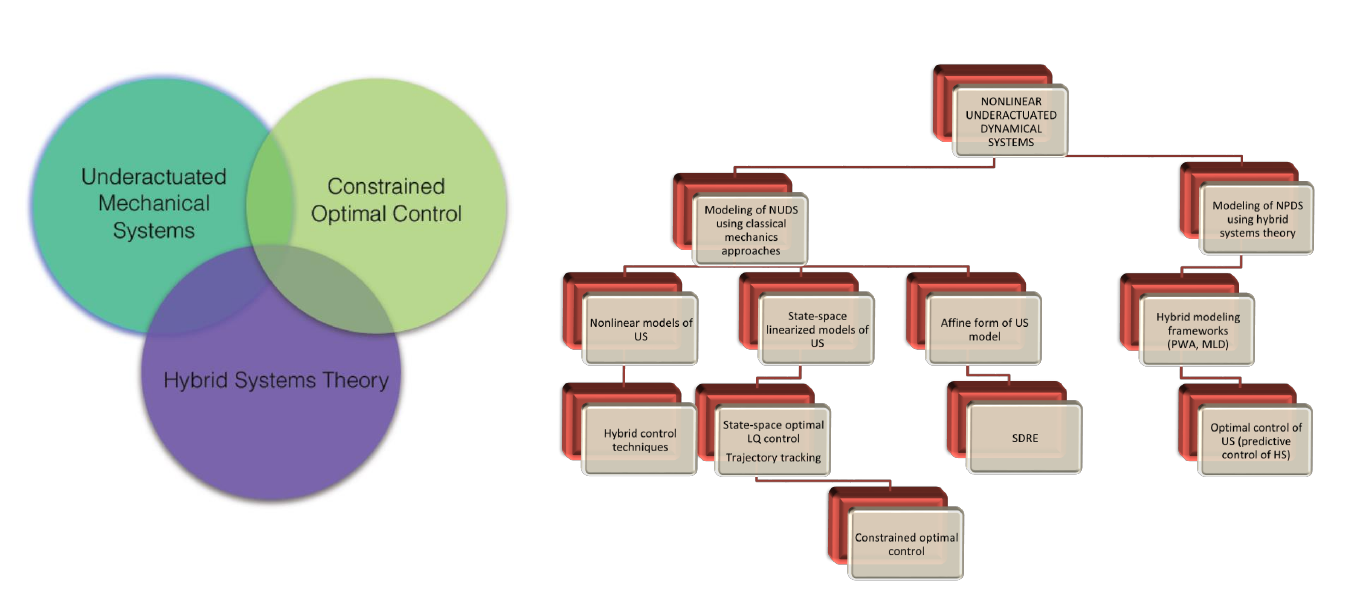
Modeling and Optimal Control of Nonlinear Underactuated Mechanical Systems – a Survey / Slávka Jadlovská - 2013.In: SCYR 2013 : Proceedings from conference : 13th Scientific Conference of Young Researchers : May 14th, 2013, Herľany, Slovakia. - Košice : FEI TU, 2013 S. 32 - 35. - ISBN 978-80-553-1422-8
2017 [1] GHOMMAN, Jawhar - CHEMORI, Ahmed Adaptive RBFNN finite-time control of normal forms for underactuated mechanical systems In: Nonlinear Dynamics Vol. 90, no. 1 (2017), p. 301-315 ISSN: 0924-090X |
1 |
Classical double inverted pendulum – a complex overview of a system / S. Jadlovská, J. Sarnovský - 2012. - 1 elektronický optický disk (CD-ROM). In: SAMI 2012 : 10th IEEE Jubilee International Symposium on Applied Machine Intelligence and Informatics : proceedings : Herľany, Slovakia, January 26-28, 2012. - Budapest : IEEE, 2012 S. 103-108. - ISBN 978-1-4577-0195-5
2014 [3] JAIWAT, Pathompong - OHTSUKA, Toshiyuki Real-time swing-up of double inverted pendulum by nonlinear model predictive control In: ADCONIP 2014 : 5th International Symposium on Advanced Control of Industrial Processes : May 28-30, 2014, Hiroshima P. 290-295
2014 [3] ASHWANI, Kharola - PRAVIN, Patil - PUNIT, Gupta A Fuzzy Logic Controller for Stabilization and Control of Double Inverted Pendulum (DIP) Using Differet Membership Function (MF´s) In: AMO - Adavanced Modeling and Optimization [online] Vol. 16, no. 3 (2014), p. 547-558 ISSN: 1184-4311
2014 [1] KAMIL, Haider G., ELDUKHRI, E.E., S. PACKIANATHER, M.S. Balancing Control of Robot Gymnast Based on Discrete-Time Linear Quadratic Regulator Technique In: AIMS 2014 : IEEE Second International Conference on Artuficial Intelligence, Modelling and Simulation : Madrid, Spail, 18-20 November 2014 P. 137-142 ISBN: 978-1-4799-7599-0
2015 [3] KHAROLA, Ashwani - PATIL, Pravin Control of Double Inverted Pendulum (DIP) using Fuzzy Hybrid Adaptive Neuro Controller In: 2014 IEEE International Conference on Computational Intelligence and Computing Research : ICCIC 2014 : TamilNadu, India, December 18-20, 2014 P. 1-7 ISBN: 978-4799-3974-9
2014 [3] LUENGAS, Lely Adriana C., CMARGO, Esperanza C., SÁNCHEZ, Giovanni P. Modelo y simulación de la marcha humana hemiparética In: Colim 2014 Memorias : 8 Congreso Latinoamerico de Ingeniería Mecánica : Cuenca - Ecuador : 25.-27.11.2014 P. 95-103 ISBN: 978-9978-10-201-5
2015 [3] VAJAYAN, Sudharsana - MATHEWS, Merin IJEECS In: Design of Rotary Inverted Pendulum with LQR Controller Vol. 4, special no. (2015), p. 22-32 ISSN: 2348-117X
2015 [1] PUNLABPHO, S., JEARSIRIPONGKUL, T. Control System for Double inverted pendulum on a cart by H-infinity controller In: International Review of Automatic Control Vol. 8, no. 4 (2015), p. 300-306 ISSN: 1974-6059
2015 [3] MAITSCHKA, Christoph M., TERRA, Marco H., SIQUEIRA, Adriano A.G. Derivation of Markovian Controller for an Exoskeleton by overcome the Benchmark of a Double Inverted pendulum In: SBAI 2015 : 12. Simposio Brasileiro de Automacao Intelligente : Natal, October 25-28, 2015 P. 1-6
2015 [1] MITSCHKA, Christoph M., TERRA, Marco H., SIQUEIRA, Adriano A.G. Derivation of a Markovian Controller for an Exo-Skeleton by overcome the Benchmarks of a Single and Double Inverted Pendulum In: CDC 2015 : 54th Annual Conference on Decision and Control : Osaka, Japan, December 15-18, 2015 P. 5061-5066 ISBN: 978-1-4799-7886-1
2017 [1] GRAHAM, Brian - TURKOGLU, Kamran Design, Build and Integration of a Low-Cost Self-Erecting Inverted Pendulum Mechanism In: AIAA Modeling and Simulation Technologies Conference : Grapevine, USA, January 9-13, 2017 P. 1-21 ISBN: 978-1-62410-451-0
2016 [1] DASH, Ranjita et al. Advance model for capturing real life human gait process In: ASME 2016 : IMECE2016 : Proceedings of the ASME 2016 International Mechanical Engineering Congress and Exposition : Volume 4A: Dynamic, Vibration, and Control : Phoenix, Arizona, November 11-17, 2016 P. 1-10 ISSN: 978-0-7918-5054-1
2017 [3] VOLJANSKAJA, N.V., VOLJANSKIJ, R.S. Matematičeskaja model sistemi dvojnoj obratnij majatnik-dvigatel pastojannovo toka In: Modern Information Technology : Sučasni Informacijni Technologii 2017 : Odesa, 22-24 May, 2017 P. 79-80 ISBN: 978-617-7424-42-9
2017 [3] KAFETZIS, Ioannis - MAYSIS, Lazaros Inverted Pendulum: A system with innumerable applications In: 9th International Week Dedicated to Maths 2017 : Thessaloniki, 15-19 March, 2017 P. 381-392 ISBN: 978-960-89672-8-1 |
13 |
A Complex Overview of the Rotary Single Inverted Pendulum System / Slávka Jadlovská, Ján Sarnovský - 2012. In: Elektro 2012 : 9th International Conference : May 21st - 22nd 2012, Žilina - Rajecké Teplice, Slovakia. - [Žilina] : IEEE, 2012 S. 305-310. - ISBN 978-1-4673-1178-6
2014 [3] FONG, Teng T., JAMALUDIN, Z., ABDULLAH, L. System identification and modeling of rotary inverted pendulum In: International Journal of Advances in Engineering & Technology Vol. 6, no. 6 (2014), p. 2342-2352 ISSN: 2231-1963
2013 [3] JAAFAR, S., JALI, M. H., ZOHEDI, F. N. State Feedback Controller Based on Pole Placement Technique for Inverted Pendulum System In: Panyelidikan Pemacu Pembangunan Negara P. 470-480 ISBN: 978-967-0334-85-1
2013 [4] RYBOVIČ, Andrej - PAŠKALA, Marek - BYSTRIČANOVÁ, Anna Design Control Strategy for Inverted Pendulum In: TRANSCOM 2013 : 10-th Europen Conference of Young Researchers and Scientists : Section 4 : Electric Power Systems Electrical and Electronic Engineering : Žlina, June 24-26, 2013, Slovak republic S. 97-100 ISBN: 978-80-554-0693-0
2015 [3] VIJAYAN, Sudharsana - MATHEWS, Merin Design of Rotary Inverted Pendulum with LQR Controller In: IJEECS Vol. 4, special no. (2015), p. 22-32 ISSN: 2348-117X
2017 [1] LIMA, Byron et al. Modeling and comparative study of linear and nonlinear controllers for rotary inverted pendulum In: Journal of Physics: Conference Series Vol. 783, no.1 (2017), article no. 012047 ISSN: 1742-6588 |
5 |
Swing-up and Stabilizing Control of Classical and Rotary Inverted Pendulum Systems / Slávka Jadlovská - 2012. - 1 elektronický optický disk (CD-ROM). In: SCYR 2012 : Proceedings from conference : 12th Scientific Conference of Young Researchers : May 15th, 2012, Herľany, Slovakia. - Košice, TU, 2012 S. 38-41. - ISBN 978-80-553-0943-9
2014 [1] QIN, Haohua, SHAO, Wei, GUO, Lantian Research and Verification on Swing-up Control Algorithm of Rotary Inverted Pendulum In: 26th Chinese Control and Decision Conference, CCDC 2014 : Changsha, China, 31 May - 2 June 2014 P. 4941-4945 ISBN: 978-147-993-7097
2016 [3] HAZEM, I. Ali - RASHA, Mohammed Nadi Optimal and Robust Tuning of State Feedback Controller for Rotary Inverted Pendulum In: Engineering and Technology Journal Vol. 34, no. 15 (2016), p. 2924-2938 ISSN: 1681-6900 |
2 |
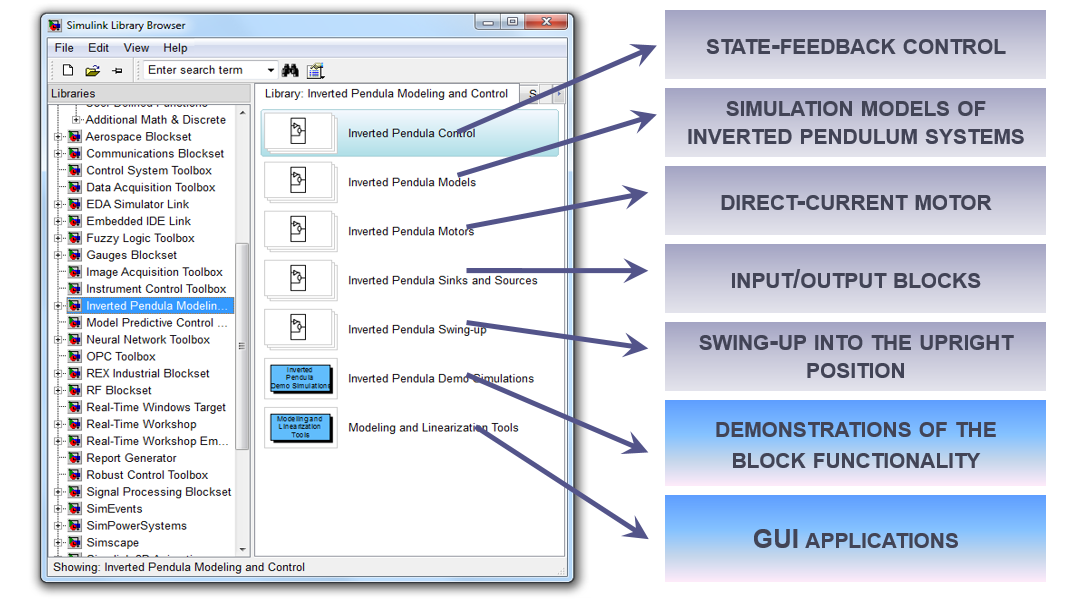
An extended simulink library for modeling and control of inverted pendula systems / Slávka Jadlovská, Ján Sarnovský - 2011. - 1 elektronický optický disk (CD-ROM). In: Technical Computing Prague 2011 : sborník příspěvků 19. ročníku konference : Praha, November 8, 2011. - Praha : Institute of Chemical Technology, 2011 P. 1-14. - ISBN 978-80-7080-794-1
2015 [1] PEREIRA, M. C., WEBER, H. I. Analysis of the Oscillation of a Self-Excited Pendulum Due to Varying Length In: PANACM 2015 : 1st Pan-American Congress on Computational Mechanics : 27-29 April 2015 P. 272-280 ISBN: 978-84-943928-2-5
2015 [3] VIJAYAN, Sudharsana - MATHEWS, Merin Design of Rotary Inverted Pendulum with LQR Controller In: IJEECS Vol. 4, special no. (2015), p. 22-32 ISSN: 2348-117X |
2 |
Inverted pendula simulation and modeling - a generalized approach / Slávka Jadlovská, Anna Jadlovská - 2010. - 1 elektronický optický disk (CD-ROM). In: Process Control 2010 : 9th International Conference : June 7 - 10, 2010, Kouty nad Desnou, Czech Republic. - Brno : Tribun EU, 2010 P. C134a-1-C134a-11. - ISBN 978-80-7399-951-3
2013 [3] SHAH, Nita - YEOLEKAR, Mahesh Pole Placement Approach for Controlling Double Inverted Pendulum In: Global Journal of Researches in Engineering Mechanical and Mechanics Engineering Vol. 13, no. 2 (2013), p. 17-22 ISSN: 0975-5861
2013 [3] KORDA, Milan - HENRION, Didier - JONES, Colin N. Convex computation of the maximum controlled invariant set for polynomial control systems In: Mathematics - Optimization and Control 31 p. ISBN: HAL : hal-00804816, version 1 arXiv : 1303.6469
2014 [1] KORDA, M., HENRION, D., JONES, C. N. Convex computation of the maximum controlled invariant set for polynomial control systems In: SIAM Journal on Control and Optimization Vol. 52, no. 5 (2014), p. 2944-2969 ISSN: 0363-0129
2016 [1] DASH, Ranjita et al. Advance model for capturing real life human gait process In: ASME 2016 : IMECE2016 : Proceedings of the ASME 2016 International Mechanical Engineering Congress and Exposition : Volume 4A: Dynamic, Vibration, and ControlPhoenix, Arizona, November 11-17, 2016 P. 1-9 ISBN: 978-0-7918-5054-1 |
4 |