
- mnohorozmerový nestabilný systém s tromi riadiacimi vstupmi a dvoma meranými výstupmi
- vhodný pre štúdium a experimenty súvisiace s teóriou riadenia dynamických systémov
- hardvérová a softvérová podpora pre identifikáciu a riadenie v reálnom čase
- široké spektrum použitia riadiacich algoritmov na úrovni prostredia Matlab s inštalovaným Real-Time Toolboxom
- knižnice v jazyku C a demonštračný softvérový balík pre riadenie PID algoritmami
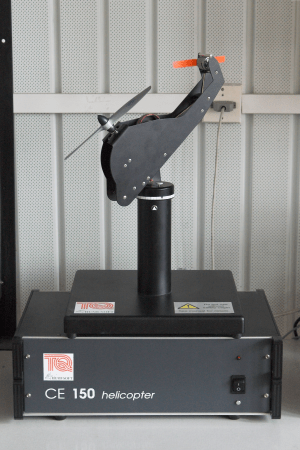
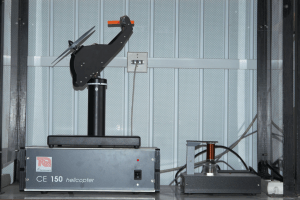
Model je zložený z tela helikoptéry, na ktorom sú dve vrtule poháňané jednosmernými motormi a z nosníka, t.j. helikoptéra predstavuje systém s dvoma stupňami voľnosti.
Prvý stupeň voľnosti predstavuje pohyb v smere osi y (elevácia y1) a druhý stupeň predstavuje pohyb v smere osi x (azimut y2). Hodnoty oboch uhlov natočenia tela helikoptéry sú závislé od otáčania vrtúľ, ktorých osi sú na seba kolmé. Obidva uhly natočenia (φ – uhol pre eleváciu, ψ – uhol pre azimut) sú merané pomocou inkrementálnych snímačov.
Motory sú riadené výkonnými zosilňovačmi, pričom napätie privedené na motory (u1, u2, u3) je priamoúmerné výstupu z počítača. Model sa pripája k PC cez multifunkčnú vstupno/výstupnú kartu MF614, na ktorú je možné zapisovať/čítať údaje pomocou funkcií Real Time Toolboxu.

riadiace vstupy
- napätie hlavného motora u1 (vstup pre ovládanie hlavnej vrtule)
- napätie vedľajšieho motora u2 (vstup pre ovládanie pomocnej vrtule)
poruchové vstupy
- vstup u3 pre ovládanie polohy ťažiska mechanického systému
- vplyv nemerateľných porúch d
merané výstupy
- uhol natočenia mechanického systému v smere osi y (elevácia)
- uhol natočenia mechanického systému v smere osi x (azimut)

predmety
- Základy automatického riadenia (2.ročník Bc. štúdia)
- Optimálne riadenie hybridných systémov (3.ročník Bc. štúdia)
- Riadenie a umelá inteligencia (1.ročník Ing. štúdia)
riešené bakalárske práce
- KAJŇÁK, O.: Programové nástroje pre modelovanie a riadenie mechatronických systémov (vedúci ZP: doc. Ing. Anna Jadlovská, PhD., konzultant ZP: Ing. Slávka Jadlovská, PhD.) – 2014
riešené diplomové práce
2010
- JAJČIŠIN, Štefan: Aplikácia moderných metód v riadení nelineárnych výukových modelov (vedúci a konzultant ZP: doc. Ing. Anna Jadlovská, PhD.) – 2010
- DOLINSKÝ, Kamil: Implementácia výsledkov experimentálnej identifikácie v riadení výukového modelu helikoptéra (vedúci a konzultant ZP: doc. Ing. Anna Jadlovská, PhD.) – 2010
2008
- LÖRINC, Ľuboš: Implementácia algoritmov riadenia dynamických systémov do SLC automatov (vedúci a konzultant ZP: doc. Ing. Anna Jadlovská, PhD.) – 2008
2007
- HORVÁTH, Martin: Riadenie dynamických systémov s využitím umelej inteligencie (vedúci a konzultant ZP: doc. Ing. Anna Jadlovská, PhD.) – 2007
- TROJČÁK, Miloš: Riadenie nelineárnych systémov – internetový prístup (vedúci a konzultant ZP: doc. Ing. Anna Jadlovská, PhD.) – 2007
2006
- LUKÁČ, Michal: Optimálne riadenie nelineárnych systémov s využitím neurónových sietí a Matlab Web Servera (vedúci a konzultant ZP: doc. Ing. Anna Jadlovská, PhD.) – 2006
- LONŠČÁK, Richard: Algoritmy riadenia virtuálnych modelov dynamických systémov s využitím Matlab Web Servera (vedúci a konzultant ZP: doc. Ing. Anna Jadlovská, PhD.) – 2006
riešené dizertačné práce
2013
- JAJČIŠIN, Štefan: Návrh algoritmov prediktívneho riadenia s využitím nelineárnych modelov fyzikálnych systémov (školiteľ: doc. Ing. Anna Jadlovská, PhD.)
- KABAKOV, Nikola: Prediktívne riadenie nelineárnych procesov (školiteľ: doc. Ing. Anna Jadlovská, PhD.)
2009
- LONŠČÁK, Richard: Inteligentné modelovanie a riadenie zložitých systémov (školiteľ: doc. Ing. Anna Jadlovská, PhD.)
publikácie
2013
JAJČIŠIN, Š. a JADLOVSKÁ, A.: Návrh algoritmov prediktívneho riadenia s využitím nelineárnych modelov fyzikálnych systémov, 1. vyd – Košice : elfa – 2013. – 139 s.. – ISBN 978-80-8086-229-9
2012
JADLOVSKÁ, A. – JAJČIŠIN, Š.: Predictive Control Algorithms Verification on the Laboratory Helicopter Model, In: Acta Polytechnica Hungarica (Journal of Applied Sciences), Vol. 9, No. 4, 2012, ISSN 1785-8860. (ADE)
2011
DOLINSKÝ, K. – JADLOVSKÁ, A.: Application of Results of Experimental Identification in Control of Laboratory Helicopter Model, Advances in Electrical and Electronic Engineering, scientific reviewed Journal published in Czech Republic, Vol. 9., Issue 4, 2011, VSB – TU of Ostrava FEE and Computer Science and University of Žilina FEE, pp.157-166, ISSN 1804 3119
2010
DOLINSKÝ, K. – JADLOVSKÁ, A. : Implementácia výsledkov experimentálnej identifikácie v riadení výukového modelu helikoptéry, In: Electrical Engineering and Informatics: Proceedings of the Faculty of Electrical Engineering and Informatics of the Technical University of Košice, September 2010 Košice, CD-ROM, pp.546-550, ISBN 978-80-553-0460-1
- JAJČIŠIN, Š. – JADLOVSKÁ, A.: Aplikácia moderných metód stavového riadenia na reálny výukový systém, In: Electrical Engineering and Informatics: Proceedings of the Faculty of Electrical Engineering and Informatics of the Technical University of Košice, September 2010 Košice, CD-ROM, pp.551-555, ISBN 978-80-553-0460-1. (AED)
2008
- JADLOVSKÁ, A. – LONŠČÁK, R.: Návrh a experimentálne overenie algoritmu optimálneho riadenia pre výukový model mechanického systému. In: Electroscope – online časopis pro elektrotechniku, ročník 2008, číslo I. ISSN 1802-4564, (2008).
2007
- JADLOVSKÁ, A. – KABAKOV, N. – LONŠČÁK, R.: Optimal Control Design for Laboratory Helicopter Model. In: Process Control ’07: 16th international conference: Štrbské Pleso, High Tatras, Slovak Republic, June 11 – 14, 2007. Bratislava: Slovak university of technology, 2007. p. 124-1-124-8. ISBN 978-80-227-2677-1.