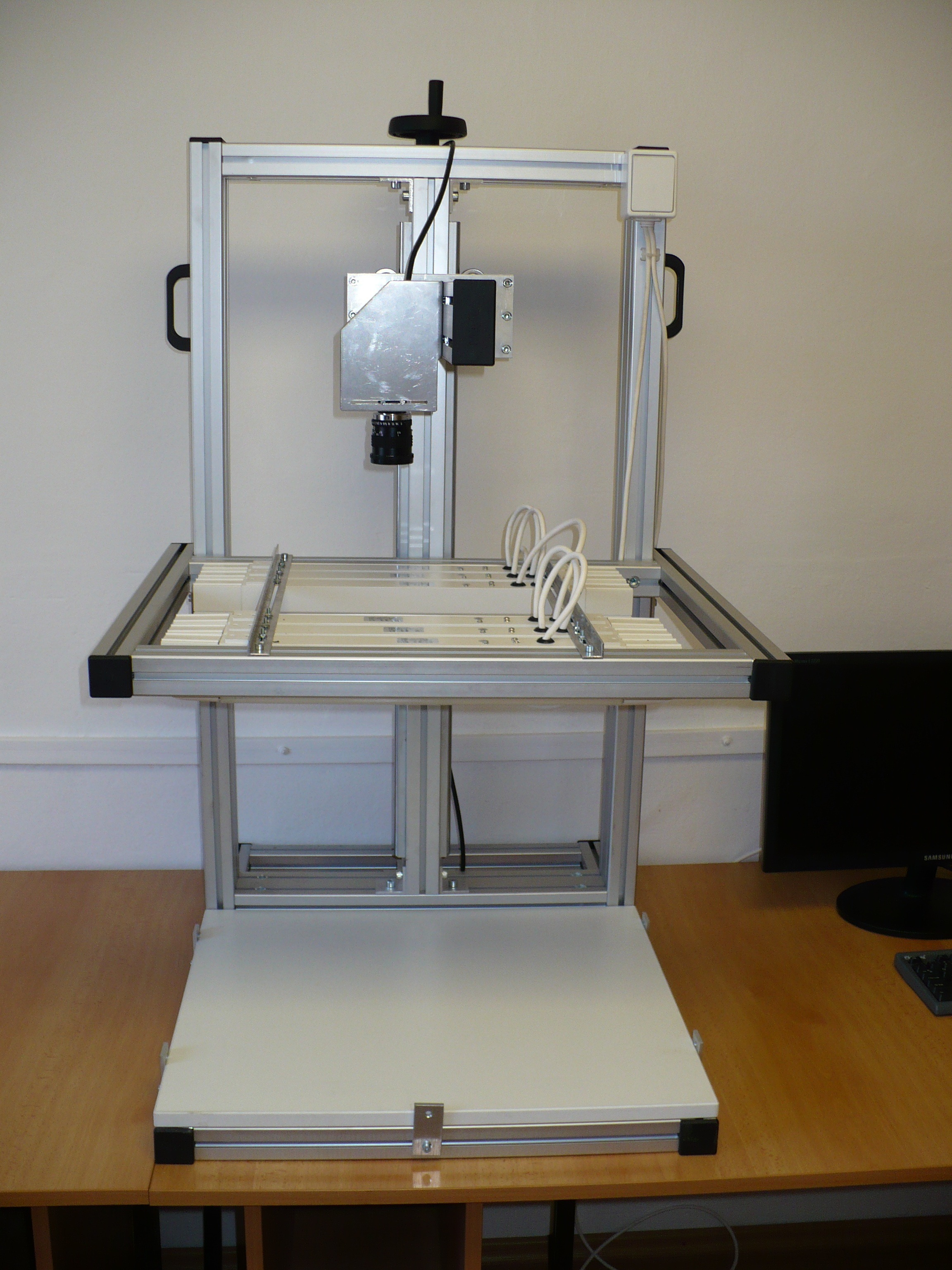
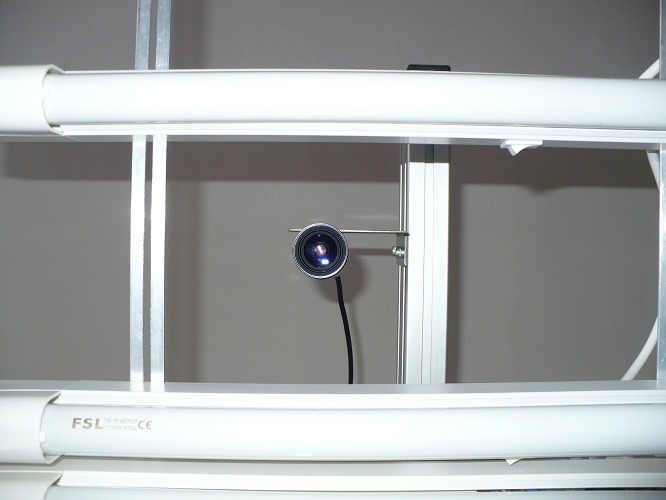
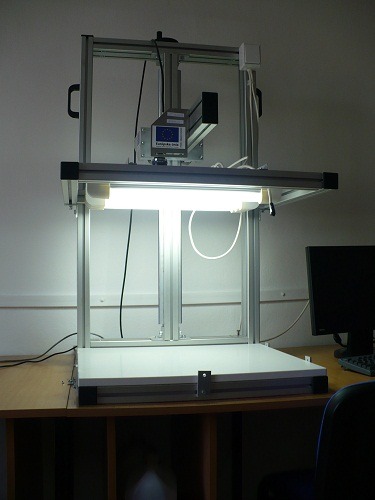
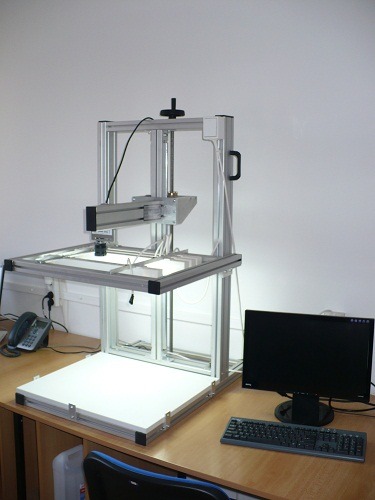
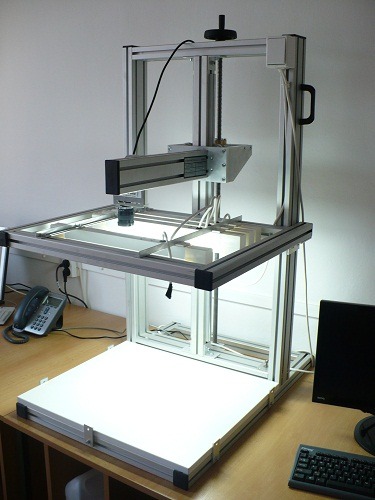
Kamerový systém MiestnosťLaboratorium modernych metód riadenia fyzikálnych systémov V142aSprávca modeludoc. Ing. Ján Jadlovský, CSc., Bc. Tomáš TkáčikVýrobcaKybernetika s.r.o. Stručná charakteristika modelu výukový laboratórny model kamerového systémuvhodný pre štúdium a experimenty súvisiace s rozpoznávaním obrazumožnosť využitia čiernobielej kamery Guppy F-503 alebo farebnej kamery AVT Marlin F-131cpripojenie k PC cez rozhranie Firewiremožnosť nastavenia intenzity osvetlenia ako aj výšku a uhol kamery Mechanické prevedenie Model pozostáva z podstavca, na ktorý sa ukladá snímaný objekt, nastavovateľného rámu s osvetlením a nastaviteľného držiaka kamery.Na držiak kamery sa umiestňuje kamera (čiernobiela alebo farebná), ktorej je možné nastaviť snímanú výšku a uhol.K PC je kamerový systém pripojený cez vysoko rýchlostné rozhranie Firewire, čo umožňuje spracovanie obrazu v reálnom čase.Snímaný obraz je spracovávaný v Matlabe alebo v aplikáciach vytvorených v jazyku C Využitie modelu v pedagogickom procese predmetyDistribuované systémy riadenia (1.ročník Ing. štúdia)riešené bakalárske práce2013PETRO, Miroslav: Návrh a realizácia aplikácie pre rozpoznávanie obrazu v jazyku C# (vedúci ZP: doc. Ing. Ján Jadlovský, CSc.) – 2013VARGA, Michal: Rozpoznávanie obrazu a komunikácia v rámci riadenia robotického futbalu (vedúci ZP: doc. Ing. Ján Jadlovský, CSc.) – 2013riešené diplomové práce2015VARGA, Michal: Spracovanie obrazu za účelom lokalizácie mobilných robotov (vedúci ZP: doc. Ing. Ján Jadlovský, CSc.) – 20152011KAČMÁR, Matej: Aplikácia systému rozpoznávania dynamických obrazov pre výrobné linky (vedúci ZP: doc. Ing. Ján Jadlovský, CSc.) – 2011ŠEPENTAL, Patrik: Aplikácia systému rozpoznávania statických obrazov pre výrobné linky (vedúci ZP: doc. Ing. Ján Jadlovský, CSc.) – 2011 Galéria