
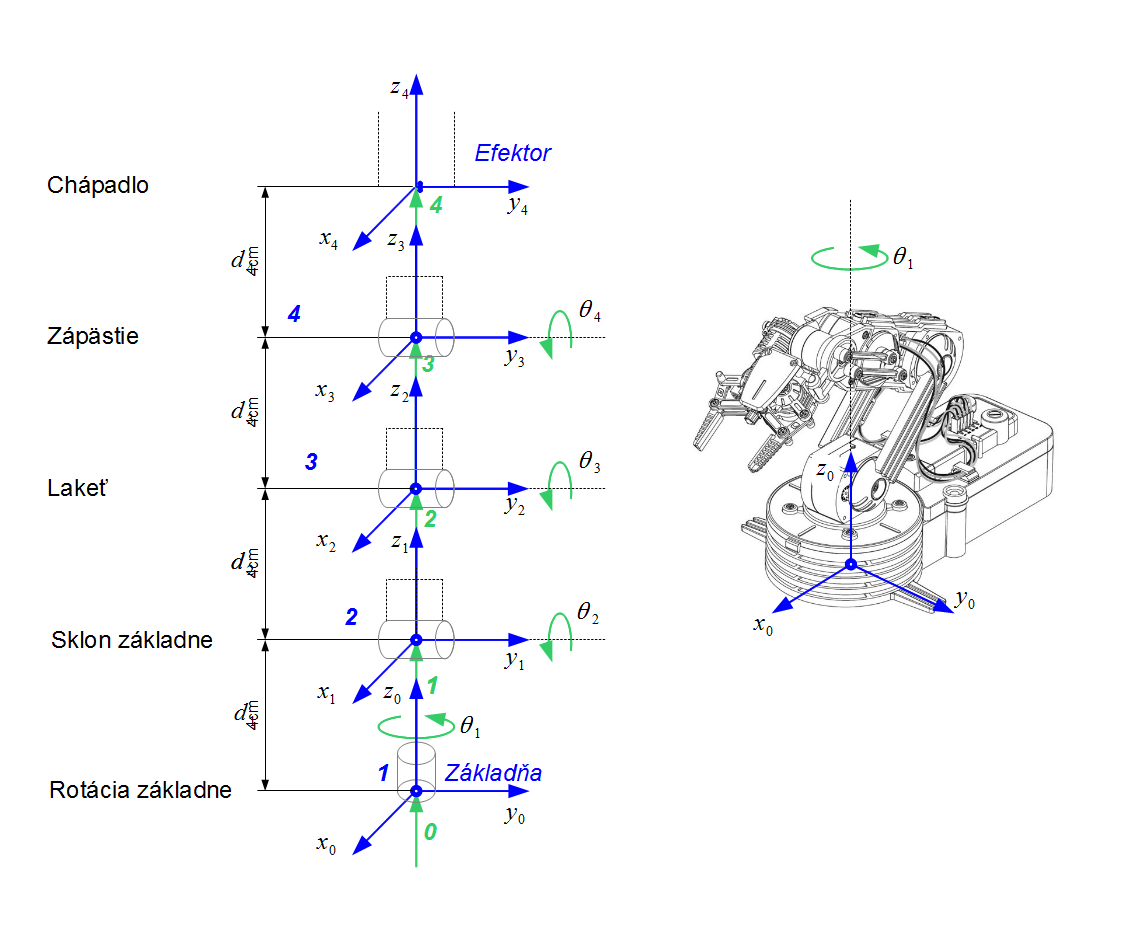
- jednoduchý, ekonomický a prenosný prezentačný model robotického ramena
- obsahuje 4 rotačné kĺby a chápadlo
- model je riadený cez PC pomocou USB cez aplickácie v jazyku C, C++ alebo C#
- hardvér a softvér robota je predmetom ďalšieho vývoja
písomná práca k dizertačnej skúške
- ČERKALA, Jakub: Príspevok k modelovaniu a riadeniu robotických systémov s využitím metód umelej inteligencie (školiteľ: doc. Ing. Anna Jadlovská, PhD.) – 2014
riešené dizertačné práce
- ČERKALA, Jakub: Modelovanie a riadenie mobilných robotov s využitím neurónových modelov (školiteľ: doc. Ing. Anna Jadlovská, PhD.) – 2016
riešené diplomové práce
- RAČEK, Dávid: Návrh knižnice simulačných modelov robotických manipulátorov v jazyku Matlab/Simulink (školiteľ: doc. Ing. Anna Jadlovská, PhD.) – 2013
2014
- ČERKALA, J.: Modeling and control of robotic systems, In: SCYR 2014 : 14th Scientific Conference of Young Researchers : proceedings from conference : May 20th, 2014, Herľany, Slovakia. – Košice : TU, 2014 S. 217-218. – ISBN 978-80-553-1714-4, (AFD)
2013
- ČERKALA, J.: Control of OWI 535 robotic arm using C# and possibilities of future applications. In: SCYR 2013 : Proceedings from conference : 13th Scientific Conference of Young Researchers : May 14th, 2013, Herľany, Slovakia. – Košice : TU, 2013 S. 23 – 25. – ISBN 978-80-553-1422-8, (AFD)