- nelineárny dynamický MIMO systém s dvoma vstupmi a dvoma výstupmi
- výukový laboratórny model, ktorý je vhodný na overovanie:
- algoritmov analytickej a experimentálnej identifikácie dynamických systémov
- algoritmov klasickej (PID/PSD), ale aj modernej teórie riadenia (stavové optimálne riadenie – LQ, stavové prediktívne riadenie – MPC)
- cieľom riadenia je:
- stabilizácia guľôčky do požadovanej polohy na ploche
- sledovanie referenčnej trajektórie
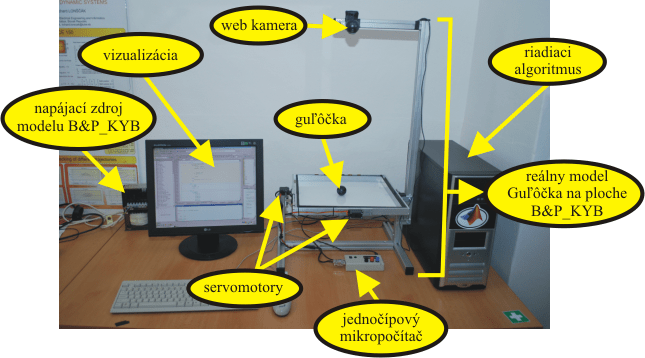
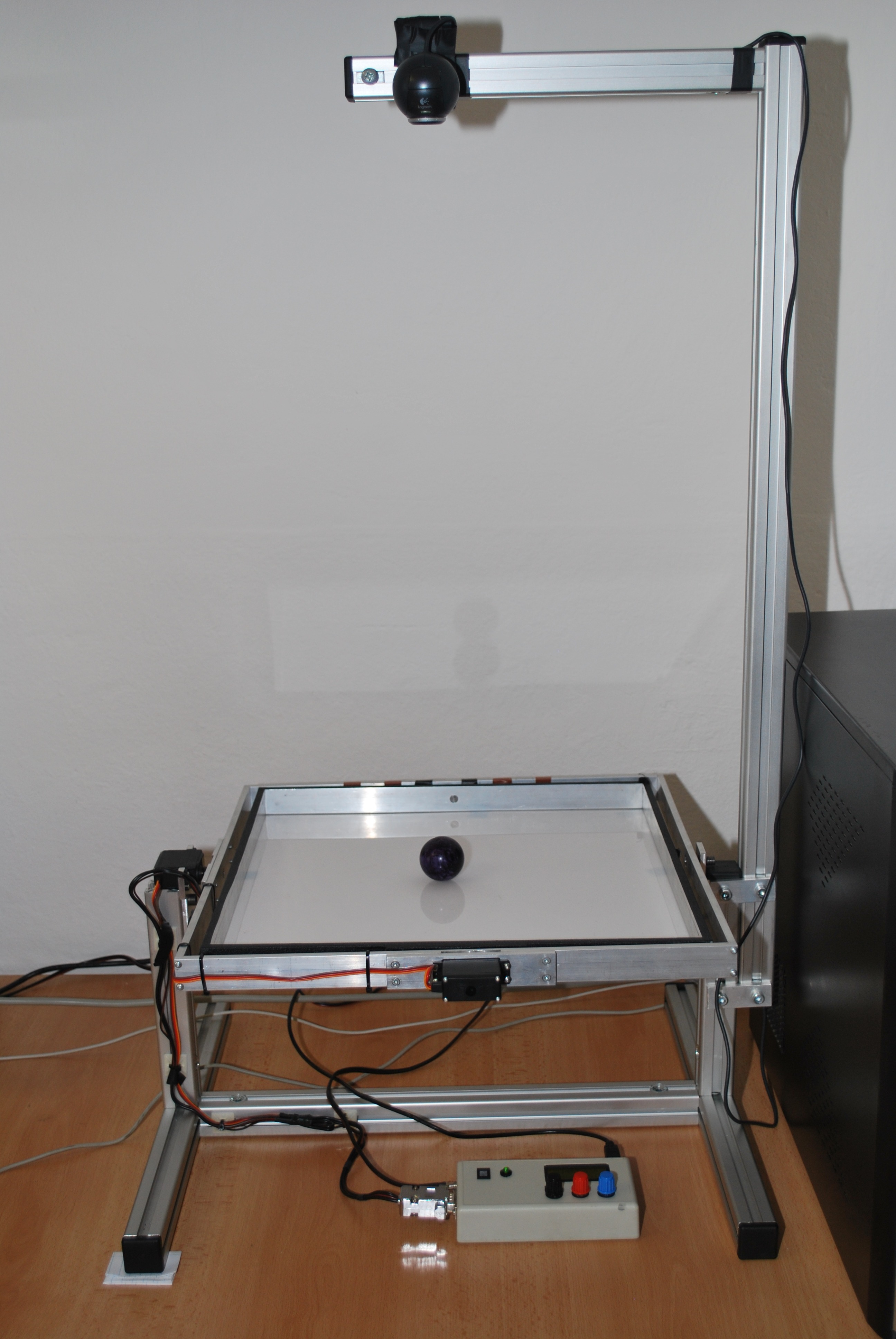
- model pozostáva z dvoch nezávislých servomotorov, ktorénatáčajú platňuokolo jej stredovej osi a web kamery, ktorá sníma polohu guľôčky
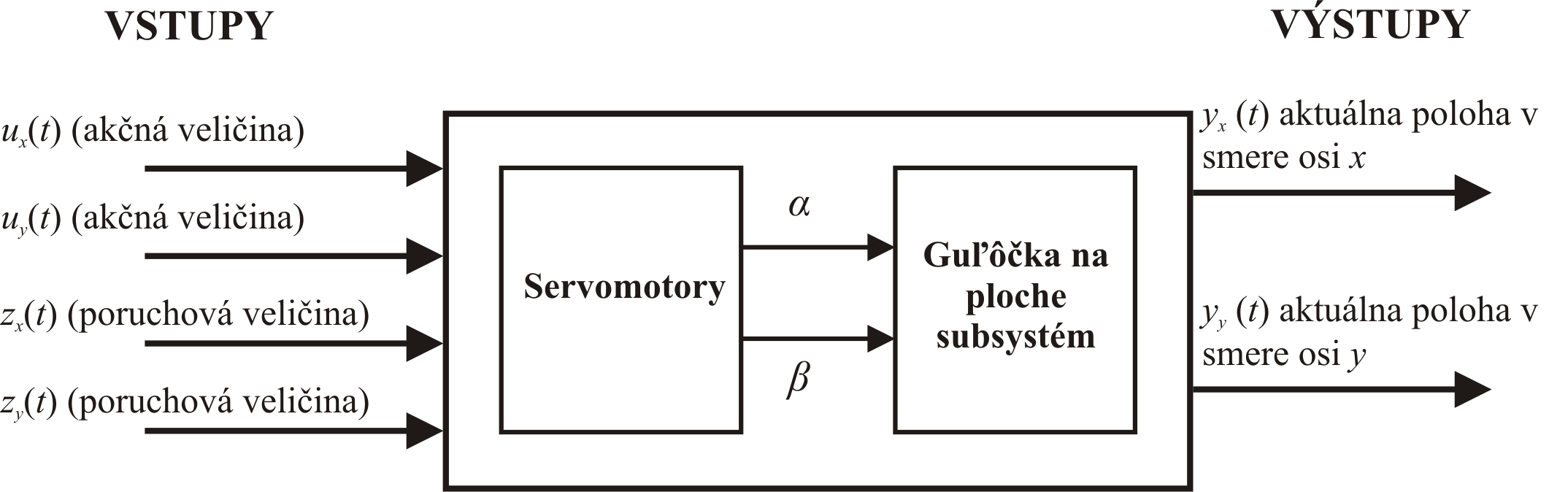
- vstupné signály do modelu ux a uy [MU] ovládajú jednotlivé servomotory, ktoré ovplyvňujú nakláňanie platne o požadovaný uhol α, resp. β[rad]. Výstupom z modelu je nasnímaná poloha guľôčky pomocou web kamery. Z nasnímaných obrázkov je pomocou algoritmu rozpoznávania obrazu vypočítaná poloha guľôčky yx a yy
- model komunikuje s počítačom prostredníctvom jednočípového mikropočítača cez sériové rozhranie RS232

riadiace vstupy
- vstupný signál ux pre servomotor nakláňajúci plochu v osi x
- vstupný signál uy pre servomotor nakláňajúci plochu v osi y
poruchové vstupy
- vplyv nemerateľných porúch zx, zy,
merané výstupy
- poloha guľôčky v osi x: yx [m]
- poloha guľôčky v osi y: yy [m]
CE151 | B&P_KYB |
|---|---|
| komunikácia medzi počítačom a modelom B&P_CE151 prostredníctvom labkarty MF614 | komunikácia medzi počítačom a modelom B&P_KYB prostredníctvom jednočípového mikropočítača cezsériovérozhranie RS232 |
| použitie funkcií REAL TIME TOOLBOXu pre komunikáciu s reálnym modelom | využitie funkcií Matlabu, určených pre komunikáciu s využitím sériového portu RS232 |
| využitie Image Processing toolboxu na rozpoznanie polohy guľôčky na ploche pomocou CCD kamery | rozpoznávanie polohy guľôčky prostredníctvom knižnice OpenCV pri použití web kamery – typ Logitech 1.3 MP Webcam C300 |
- Výskumné laboratórium nelineárnych podaktuovaných systémov TUKE FEI-2015-33 (Research laboratory for nonlinear underactuated systems)(1/2017 – 12/2017)
- Univerzitný vedecký park Technicom pre inovačné aplikácie s podporou znalostných technológií – II.fáz, kód ITMS:313011D232, spolufinancovaný zo zdrojov Európskeho fondu regionálneho rozvoja, (2015 – 2017), Centrum pre nedeštruktívnu diagnostiku technologických procesov so štandardným softvérovým vybavením pre riadenie a komunikáciu (aktivita 3.1, PP7)
- Univerzitný vedecký park Technicom pre inovačné aplikácie s podporou znalostných technológií, kód ITMS:26220220182, spolufinancovaný zo zdrojov Európskeho fondu regionálneho rozvoja, (2013 – 2015), Centrum pre nedeštruktívnu diagnostiku technologických procesov so štandardným softvérovým vybavením pre riadenie a komunikáciu (aktivita 3.1)
predmety
- Základy automatického riadenia (2.ročník Bc. štúdia)
- Simulačné systémy (2.ročník Bc. štúdia)
- Riadenie a umelá inteligencia (1.ročník Ing. štúdia)
- Optimálne riadenie hybridných systémov (1.ročník Ing. štúdia)
riešené bakalárske práce
2019
- KLADNÝ, Lukáš: Využitie interaktívnych prostriedkov programového prostredia MATLAB v riadení a simulácii laboratórneho modelu Guľôčka na ploche (vedúci ZP: doc. Ing. Anna Jadlovská, PhD., konzultant ZP: Ing. Slávka Jadlovská, PhD.) – 2019
2017
- GOFFA, Tomáš: Meranie a frekvenčná analýza mechanického kmitania vybraných laboratórnych modelov (vedúci ZP: doc. Ing. Anna Jadlovská, PhD., konzultant ZP: Ing. Matej Oravec) – 2017
2012
- ORAVEC, Matej: Simulácia modelov dynamických systémov s využitím webových aplikácií na báze .NET (vedúci ZP: doc. Ing. Anna Jadlovská, PhD.) – 2012
2011
- KUNDRÁT, Štefan : Aplikácia MPT Toolbox-u v modelovaní a riadení nelineárnych systémov (vedúci ZP: doc. Ing. Anna Jadlovská, PhD.) – 2011
2010
- BENETIN, M,: Návrh a simulácia riadenia virtuálneho modelu fyzikálneho systému Gulička na tyči (vedúci ZP: doc. Ing. Anna Jadlovská, PhD., konzultant: Ing. Peter Šuster.) – 2010
riešené diplomové práce
2015
- NOVISEDLÁKOVÁ, Dana: Adaptívne a optimálne riadenie nelineárnych dynamických systémov (vedúci ZP: doc. Ing. Anna Jadlovská, PhD, konzultant: Ing. Matej Oravec) – 2015
2014
- ORAVEC, Matej: Riadenie mechatronických systémov s využitím .NET aplikácií (vedúci ZP: doc. Ing. Anna Jadlovská, PhD, konzultant: Ing. Slávka Jadlovská) – 2014
2013
- MATYS, Matúš: Prediktívne riadenie modelov fyzikálnych systémov (vedúci ZP: doc. Ing. Anna Jadlovská, PhD, konzultant: Ing. Štefan Jajčišin.) – 2013
2012
- BENETIN, Martin : Výukové programové moduly pre analýzu a syntézu modelov fyzikálnych systémov (vedúci ZP: doc. Ing. Anna Jadlovská, PhD.) – 2012
Riešené dizertačné práce
- Ing. ORAVEC, Matej: Metódy a prístupy nedeštruktívnej diagnostiky dynamických systémov (školiteľ: doc. Ing. Anna Jadlovská, PhD.) – 2018
Publikácie
-
2020
- ORAVEC, M. – JADLOVSKÁ, A.: Actuator Fault Diagnosis System Design and Verification for Ball and Plate System, In: Acta Polytechnica Hungarica, Journal of Applied Sciences, Vol.17, No.5, pp. 69-88, 2020, Online
-
2017
- ORAVEC, M. – JADLOVSKÁ, A.: Intelligent Positioning Plate Predictive Control and Concept of Diagnosis System Design. In: Journal of Manufacturing and Industrial Engineering 2017 – Prešov: TU, 2017 – ISSN: 1339-2972
- ORAVEC, M. – JADLOVSKÁ, A.: Intelligent Positioning Plate Predictive Control and Concept of Diagnosis System Design. In: Journal of Manufacturing and Industrial Engineering 2017 – Prešov: TU, 2017 – ISSN: 1339-2972 (ADF)
-
2015
- ORAVEC, M. – JADLOVSKÁ, A.: Model Predictive Control of Ball and Plate Laboratory Model. In: SAMI 2015. – Danvers : IEEE, 2015 S. 165-170. – ISBN 978-1-4799-8220-2 (AFD)
- ORAVEC, M. – JADLOVSKÁ, A. – NOVISEDLÁKOVÁ, D.: Design of Adaptive Control Algorithm of Mechatronic System Ball&Plate. In: Electrical Engineering and Informatics 6 : Proceedings of the Faculty of Electrical Engineering and Informatics of the Technical University of Košice. – Košice : FEI TU, 2015 S. 500-505. – ISBN 978-80-553-2178-3 (AED
-
2014
- ORAVEC, M. – JADLOVSKÁ, A.: Optimal State Control of the Mechatronical Laboratory Model B&P_Kyb. In: Electrical Engineering and Informatics 5 : Proceedings of the Faculty of Electrical Engineering and Informatics of the Technical University of Košice. – Košice : TU, 2014 S. 9-16. – ISBN 978-80-553-1704-5 (AED)
- ORAVEC, M. – JADLOVSKÁ, A.: Design Of Virtual Models Of Mechatronics Systems With Simulink 3D Animation Toolbox. In: Proceedings of the International Scientific Conference – Technical Computing Bratislava 2014, 4. november 2014, Bratislava, Slovenská republika, ISBN 978-80-7080-898-6, ISSN 2336-1662. (AFD)
Prezentácia výskumnej činnosti
- JADLOVSKÝ, J. – JADLOVSKÁ, A. – SARNOVSKÝ, J. – ZOLOTOVÁ, I. – JADLOVSKÁ, S. – PAPCUN, P. – ČERKALA, J. – KOPČÍK, M. – ČABALA, J. – ORAVEC, M. – ČOPÍK, M.: Center for Nondestructive Diagnostics of Technological Processes, In: University Science Park TECHNICOM. – Košice : TU, 2014 S. 1-1. – ISBN 979-80-8086-240-4
- JADLOVSKÝ, J. et al. : Research Activities of the Center of Modern Control Techniques and Industrial Informatics In: In: SAMI 2016. – Danvers : IEEE, 2016 P. 279-285. – ISBN 978-1-4673-8739-2
- Centrum Moderných Metód Riadenia a Priemyselnej Informatiky na KKUI FEI TU v Košiciach (prezentácia výsledkov medzinárodného projektu základného výskumu ALICE CERN – ALICE KE FEI TU a projektu aplikovaného výskumu TECHNICOM PP7/3.1)


