- výskumný laboratórny model pre nedeštruktívnu diagnostiku
- vhodný pre štúdium a experimenty súvisiace s teóriou riadenia dynamických podaktuovaných systémov
- identifikáciu a riadenie v reálnom čase cez komunikáciu pomocou PLC
- široké spektrum použitia riadiacich algoritmov na úrovni prostredia Matlab na báze OPC a DDE komunikačných protokolov
Multifunkčné pracovisko nedeštruktívnej diagnostiky je implementované ako kyber-fyzikálny systém v rámci distribuovaného systému riadenia.
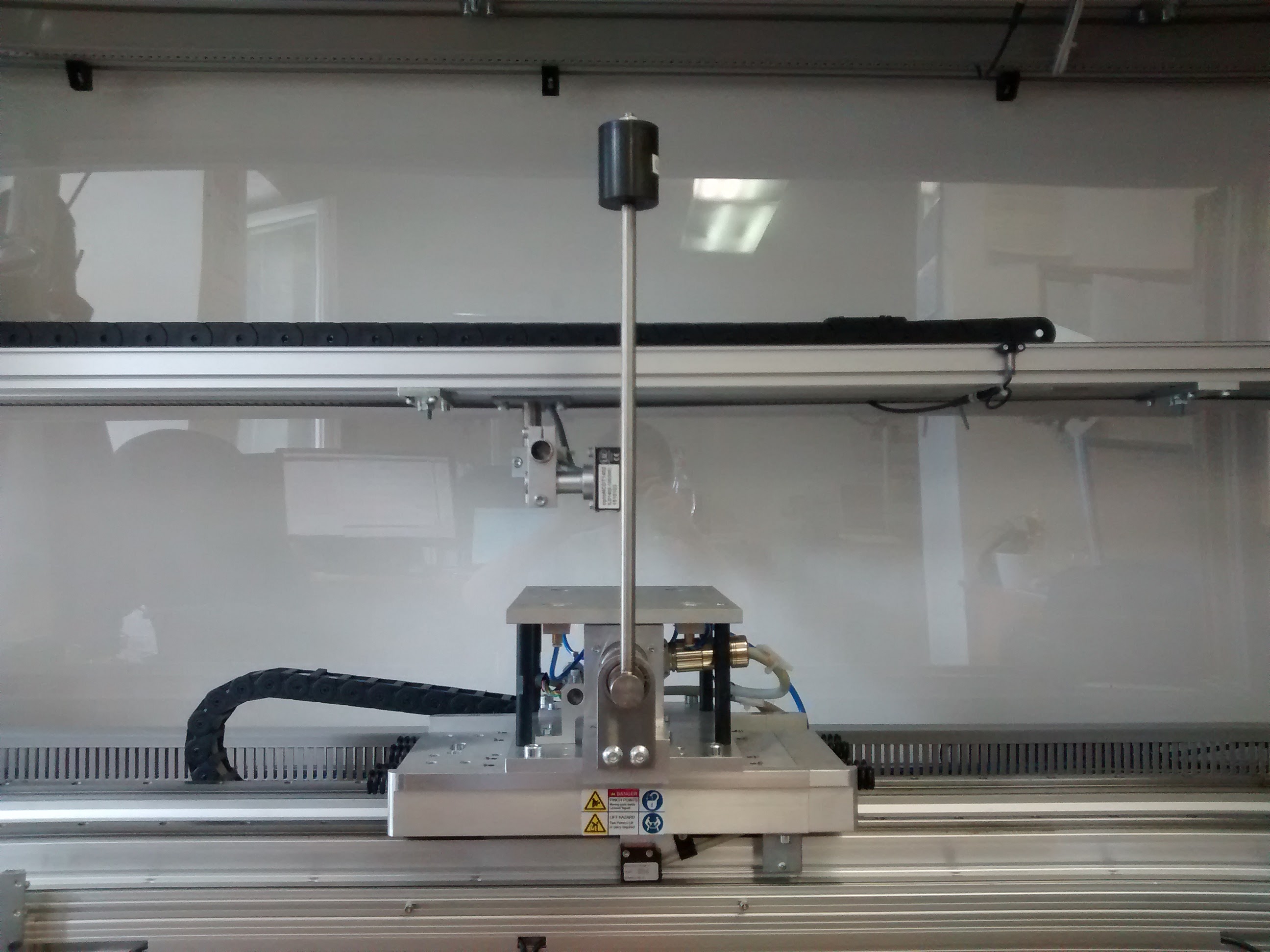
Mechanická úroveň snímačov a akčných členov je reprezentovaná mechanickou konštrukciou inverzného kyvadla s lineárnym synchrónnym motorom. Pozícia motora je snímaná IRC snímačom s presnosťou 1000 impulzov/mm. Platí predpoklad, že vozík je časťou kotvy motora. Koncové pozície dráhy vozíka sú snímané indukčnými snímačmi. Uhlová výchylka tyče kyvadla pripevneného ku vozíku, je snímaná pomocou uhlového konvertora KINAX-2W2 s presnosťou 220 impulzov/stupeň.
V rámci technologickej a riadiacej úrovne je regulácia polohy motora vykonávaná pomocou servomotoru KINETIX 6500 s frekvenčným meničom, ktorý je napojený na CompactLogix PLC cez Ethernet. Nakoľko stabilizácia inverzného kyvadla vyžauje rýchle odozvy, hodnoty zo snímačov polohy motora a uhlovej výchzlky tyče kyvadla sú napojené na programovateľné vstupy KINETIX 6500. Implementácia algoritmov riadenia je vykonávaná v rámci programového prostredia RSLogix 5000.

- Implementácia výsledkov vedeckého výskumu v oblasti modelovania a simulácie kyberfyzikálnych systémov do výučby – tvorba moderných vysokoškolských učebníc (KEGA 072 TUKE – 4/2018)
- Výskumné laboratórium nelineárnych podaktuovaných systémov TUKE FEI-2015-33 (Research laboratory for nonlinear underactuated systems)(1/2017 – 12/2017)
- Jadlovská, S., Vošček, D.: Research Laboratory of Nonlinear Underactuated Systems, Mechatronics 4.0 in Education – International Seminar on Internet of Things, Digitalization, Industry 4.0, Cyber-physical Systems and Mechatronics Education, Kodaň – 20-21.6.2017
- Univerzitný vedecký park Technicom pre inovačné aplikácie s podporou znalostných technológií – II.fáz, kód ITMS:313011D232, spolufinancovaný zo zdrojov Európskeho fondu regionálneho rozvoja, (2015 – 2017), Centrum pre nedeštruktívnu diagnostiku technologických procesov so štandartným softvérovým vybavením pre riadenie a komunikáciu (aktivita 3.1, PP7),
- Jadlovská, A. – Jadlovská, S. – Vošček, D. – Cyber-physical system implementation into the distributed control system. In: ScienceDirect : IFAC-PapersOnLine. – Amsterdam : Elsevier, 2016 Vol. 49, no. 25 (2016), p. 031-036. – ISSN 2405-8963 (AFC)
- Research Activities of the Center of Modern Control Techniques and Industrial Informatics
- Center for Nondestructive Diagnostics of Technological Processes
- Centrum Moderných Metód Riadenia a Priemyselnej Informatiky na KKUI FEI TU v Košiciach (prezentácia výsledkov medzinárodného projektu základného výskumu ALICE CERN – ALICE KE FEI TU a projektu aplikovaného výskumu TECHNICOM PP7/3.1)
- Univerzitný vedecký park Technicom pre inovačné aplikácie s podporou znalostných technológií, kód ITMS:26220220182, spolufinancovaný zo zdrojov Európskeho fondu regionálneho rozvoja, (2013 – 2015), Centrum pre nedeštruktívnu diagnostiku technologických procesov so štandartným softvérovým vybavením pre riadenie a komunikáciu (aktivita 3.1)
2020
- VOŠČEK, D. – JADLOVSKÁ, A.: Hybridné modely kyber-fyzikálnych systémov a ich aplikácia v rámci distribuovaného systému riadenia . In: QuoVadis Research @ FEI – Košice: TU, vol. 3, no. 1, pp. 90–104, 2020, ISSN: 2585-9587
- KOSKA, L., JADLOVSKÁ, S., VOŠČEK, D., JADLOVSKÁ, A.: INVERTED PENDULUM WITH LINEAR SYNCHRONOUS MOTOR SWING UP USING BOUNDARY VALUE PROBLEM.In: Acta Polytechnica , Vol. 59, no. 5 (2019) – ISSN 1210-2709
- Jadlovská, S., Vošček, D.: Research Laboratory of Nonlinear Underactuated Systems, Mechatronics 4.0 in Education – International Seminar on Internet of Things, Digitalization, Industry 4.0, Cyber-physical Systems and Mechatronics Education, Kodaň – 20-21.6.2017
- JADLOVSKÁ, S. – KOSKA, L. – KENTOS, M.: . MATLAB-based Tools for Modelling and Control of Underactuated Mechanical Systems In: Transactions on Electrical Engineering. Vol. 6, No. 3 (2017), p. 56-61. – ISSN 1805-3386 (ADE)
- VOŠČEK, D.: Contribution to hybrid models of cyber-physical systems and their implementation into distributed control system In: SCYR 2017., Košice : TU, 2017 pp. 62-63. – ISBN 978-80-553-3162-1, (AFD)
- JADLOVSKÁ, A. – JADLOVSKÁ, S. – VOŠČEK, D.: Cyber-physical system implementation into the distributed control system In: ScienceDirect: IFAC-PapersOnLine. – Amsterdam : Elsevier, 2016 Vol. 49, no. 25 (2016), p. 031-036., ISSN 2405-8963 , (AFC)
- JADLOVSKÝ, J. – JADLOVSKÁ, A. – JADLOVSKÁ, S. – ČERKALA, J. – KOPČÍK, M. – ČABALA, J. – ORAVEC, M. – VARGA, M. – VOŠČEK, D.: Research Activities of the Center of Modern Control Techniques and Industrial Informatics In: SAMI 2016. – Danvers : IEEE, 2016 S. 279-285. – ISBN 978-1-4673-8739-2, (AFD)
- JADLOVSKÁ, S. – SARNOVSKÝ, J. – VOJTEK, J. – VOŠČEK, D.: Advanced Generalized Modelling of Classical Inverted Pendulum Systems In: Advances in Intelligent Systems and Computing. – Switzerland : Springer, 2015 Vol. 316, no. 1 (2015), p. 255-264. – ISSN 2194-5357 (ADM)
- JADLOVSKÁ, S. – KENTOŠ, M.- KOSKA, L. – SARNOVSKÝ, J.: Program Tools for Modeling and Control of Underactuated Mechanical Systems In: Technical Computing Prague 2015. – Prague : University of Chemistry and Technology, 2015 P. 1-9. – ISBN 978-80-7080-936-5 – ISSN 2336-1662, (AFC)
- JADLOVSKÁ, S.: A Final Look Back at Underactuated Mechanical Systems In: SCYR 2015. – Košice : TU, 2015 S. 150-152. – ISBN 978-80-553-2130-1, (AFD)
- JADLOVSKÝ, J. – JADLOVSKÁ, A. – SARNOVSKÝ, J. – ZOLOTOVÁ, I. – JADLOVSKÁ, S. – PAPCUN, P. – ČERKALA, J. – KOPČÍK, M.- ČABALA, J. – ORAVEC, M. – ČOPÍK, M.: Center for Nondestructive Diagnostics of Technological Processes, In: University Science Park TECHNICOM. – Košice : TU, 2014 S. 1-1. – ISBN 979-80-8086-240-4 (AFL)
- JADLOVSKÁ, S.: Underactuated mechanical systems: recent findings and future challenges In: SCYR 2014 : 14th Scientific Conference of Young Researchers : proceedings from conference : May 20th, 2014, Herľany, Slovakia. – Košice : TU, 2014 S. 275-276. – ISBN 978-80-553-1714-4 (AFD)
- JADLOVSKÁ, S. – SARNOVSKÝ, J.: Modelling of Classical and Rotary Inverted Pendulum Systems – a Generalized Approach In: Journal of Electrical Engineering. Roč. 64, č. 1 (2013), s. 12-19. – ISSN 1335-3632 (ADN)
- JADLOVSKÁ, S. – SARNOVSKÝ, J.: A complex overview of modeling and control of the rotary single inverted pendulum system In: Advances in Electrical and Electronic Engineering. Vol. 11, no. 2 (2013), p. 73-85. – ISSN 1336-1376 , (ADM)
- JADLOVSKÁ, A. – JADLOVSKÁ, S.: Moderné metódy modelovania a riadenia nelineárnych systémov,1. vyd – Košice : elfa – 2013. – 257 s.. – ISBN 978-80-8086-228-2. (AAB)
- JADLOVSKÁ, S. – SARNOVSKÝ, J.: Application of the state-dependent Riccati equation method in nonlinear control design for inverted pendulum systems In: SISY 2013 : IEEE 11th International Symposium on Intelligent Systems and Informatics : proceedings : Subotica, Serbia, September 26-28, 2013. – Subotica : IEEE, 2013 P. 209-214. – ISBN 978-1-4799-0305-4, (AFC)
- JADLOVSKÁ, S.: Modeling and Optimal Control of Nonlinear Underactuated Mechanical Systems – a Survey In: SCYR 2013 : Proceedings from conference : 13th Scientific Conference of Young Researchers : May 14th, 2013, Herľany, Slovakia. – Košice : FEI TU, 2013 S. 32 – 35. – ISBN 978-80-553-1422-8 , (AFD)
- JADLOVSKÁ, S. – SARNOVSKÝ, J.: Nonlinear control design for inverted pendulum systems based on state-dependent Riccati equation approach In: AEI´2012 : International Conference on Applied Electrical Engineering and Informatics 2012 : August 26-September 02, 2012, Germany. – Košice FEI TU, 2012 P. 22-26. – ISBN 978-80-553-1030-5 , (AFC)
- JADLOVSKÁ, S. – SARNOVSKÝ, J.: Classical double inverted pendulum – a complex overview of a system In: SAMI 2012 : 10th IEEE Jubilee International Symposium on Applied Machine Intelligence and Informatics : proceedings : Herľany, Slovakia, January 26-28, 2012. – Budapest : IEEE, 2012 S. 103-108., elektronický optický disk (CD-ROM).ISBN 978-1-4577-0195-5 (AFD)
- JADLOVSKÁ, S. – SARNOVSKÝ, J.: A Complex Overview of the Rotary Single Inverted Pendulum System In: Elektro 2012 : 9th International Conference : May 21st – 22nd 2012, Žilina – Rajecké Teplice, Slovakia. – [Žilina] : IEEE, 2012 S. 305-310. – ISBN 978-1-4673-1178-6 (AFD)
- JADLOVSKÁ, S.: Swing-up and Stabilizing Control of Classical and Rotary Inverted Pendulum Systems In: SCYR 2012 : Proceedings from conference : 12th Scientific Conference of Young Researchers : May 15th, 2012, Herľany, Slovakia. – Košice, TU, 2012 S. 38-41, elektronický optický disk (CD-ROM). ISBN 978-80-553-0943-9 , (AFD)
- JADLOVSKÁ, S. – SARNOVSKÝ, J.: An extended simulink library for modeling and control of inverted pendula systems In: Technical Computing Prague 2011: sborník příspěvků 19. ročníku konference : Praha, November 8, 2011. – Praha: Institute of Chemical Technology, 2011 P. 1-14. , elektronický optický disk (CD-ROM).- ISBN 978-80-7080-794-1, (AFC)
- JADLOVSKÁ, S. – JADLOVSKÁ, A.: Inverted pendula simulation and modeling – a generalized approach In: Process Control 2010: 9th International Conference : June 7 – 10, 2010, Kouty nad Desnou, Czech Republic. – Brno : Tribun EU, 2010 P. C134a-1-C134a-11, elektronický optický disk (CD-ROM). – ISBN 978-80-7399-951-3 , (AFC)
- JADLOVSKÁ, S.- JADLOVSKÁ, A.: A simulink library for inverted pendula modeling and simulation In: Technical Computing Prague 2009 : sborník příspěvků 17. ročníku konference : Praha, 19.11.2009. – Prague : Humusoft, 2009 P. 1-12., ISBN 978-80-7080-733-0 (AFC)
Bakalárske práce
- BURKUŠ, Jozef: Modelovanie a simulácia robotických systémov v prostredí MATLAB/Simulink s využitím špecializovaných toolboxov. (vedúci DP: doc. Ing. Anna Jadlovská, PhD., konzultant DP: Ing. Slávka Jadlovská, PhD.) – 2020
diplomové práce
2020
- DURKÁČ, Martin: Metódy a prístupy pre fyzikálne modelovanie, simuláciu a riadenie kyber-fyzikálnych systémov (vedúci DP: doc. Ing. Anna Jadlovská, PhD., konzultant DP: Ing. Slávka Jadlovská, PhD.) – 2020
2016
- KENTOŠ, Matej: Návrh softvérových nástrojov pre analýzu a riadenie nelineárnych podaktuovaných systémov (vedúci DP: doc. Ing. Anna Jadlovská, PhD., konzultant DP: Ing. Slávka Jadlovská) – 2016
2015
- VOŠČEK, Dominik: Metódy a algoritmy pre modelovanie a riadenie podaktuovaných mechanických systémov (vedúci DP: prof. Ing. Ján Sarnovský, CSc., konzultant DP: Ing. Slávka Jadlovská) – 2015
riešené dizertačné práce
2021
- KOSKA, Lukáš: Návrh metodiky pre modelovanie a simuláciu efektívne kráčajúcich robotických systémov s využitím moderných softvérových nástrojov a jej integrácia do distribuovanej riadiacej štruktúry (školiteľ: doc. Ing. Anna Jadlovská, PhD.) – zatiaľ neobhájená
2020
- Varga, Michal: Klasifikácia 3D obrazov pomocou generatívnych modelov, (školiteľ: doc. Ing. Ján Jadlovský, CSc.) – zatiaľ neobhájená
2019
- Vošček, Dominik: Hybridné modely kyber-fyzikálnych systémov a ich aplikácia v rámci distribuovaného systému riadenia, (školiteľ: doc. Ing. Anna Jadlovská, PhD.)
2015
- JADLOVSKÁ, Slávka: Modelovanie a optimálne riadenie nelineárnych podaktuovaných dynamických systémov (školiteľ: prof. Ing. Ján Sarnovský, CSc.)