
- nestabilný mechatronický systém určený pro výuku a demonštráciu algoritmov automatického riadenia
- pomocou otočného ramena ovládaného motorom možno vynútiť alebo potlačiť pohyb voľne otočného kyvadla a dosiahnuť požadovaný cieľ riadenia
- jadrom modelu je riadiaci systém REX, ktorý spracúva signály zo senzorov, realizuje riadiace algoritmy pomocou zabudovanej knižnice funkčných blokov a ovláda motor
- kompatibilita systému REX s programovým prostredím MATLAB/Simulink umožňuje testovať navrhnutý riadiaci algoritmus v simulačnom prostredí s využitím matematicko-fyzikálneho modelu
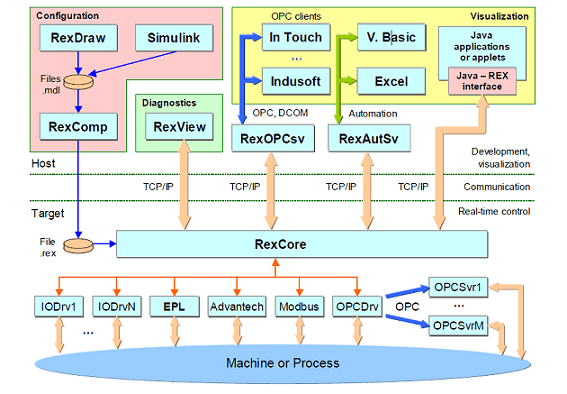
- otvorený a škálovateľný systém vhodný pro vnorené (embedded) riadenie; spája riadenie v reálnom čase s vývojovým prostredím pre operátorské ovládanie riadiaceho systému
- základné zložky vývojového prostredia (vyššej vrstvy) sú:
- RexDraw – zabudovaný grafický editor, ktorý umožňuje navrhovať funkčné blokové schémy riadiaceho systému REX v tvare .mdl súborov; možno ho nahradiť Simulinkom so zabudovanou knižnicou RexLib
- RexComp – kompilátor, ktorý na základe hlavného súboru projektu aplikácie vo formáte .mdl generuje binárny .rex súbor systému REX
- RexView – diagnostický nástroj, ktorý poskytuje detailné, hierarchicky usporiadané informácie o premenných v rámci blokov a trendoch vývoja pri behu v reálnom čase
- nástroje na vizualizáciu – pripojené na riadiaci systém prostredníctvom OPC rozhrania
- Štruktúru cieľového prostredia (nižšiu vrstvu) tvorí:
- RexCore – riadiace jadro systému; vstupno-výstupné ovládače sú implementované ako samostatné .dll súbory kvôli modularite
- vývojové nástroje systému REX boli pôvodne vyvinuté pro operačný systém Windows a priemyselné PC s operačným systémom pevného reálneho času (hard real-time) PharLap ETS cez rozhranie PCI (I/O karty Advantech)
- REX bol neskôr (2009) prepracovaný na báze komunikačného protokolu Ethernet Powerlink; vyvinutý bol ovládač EplDrv a systém REX bol prenesený na platformu Alix s operačným systémom Linux a nadstavbou Xenomai pre real-time aplikácie, čím sa riadiace jadro oddelilo od vstupno-výstupných modulov
- jeden z prvých modelov firmy REX Controls založený na modifikovanej architektúre systému REX na báze Linuxu
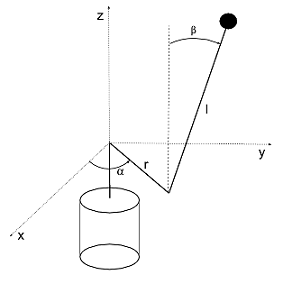
- model je zložený z ramena otáčavého vo vodorovnej rovine a k nemu pripojeného kyvadla, ktoré sa môže voľne otáčať v rovine kolmej na vodorovné rameno
- ovládanie otočenia vodorovného ramena je zabezpečené pomocou servopohonu na báze striedavého brushless synchrónneho motora s oddelenou planetárnou prevodovkou
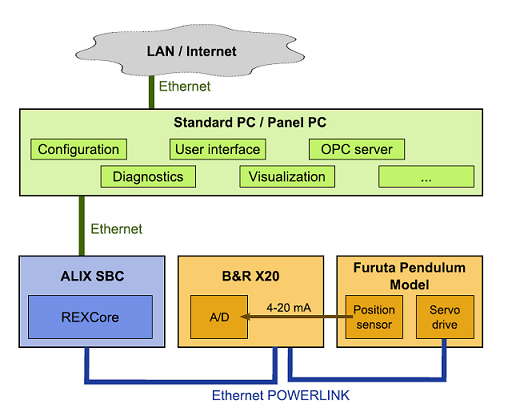
- nadradenou vrstvou (rozhraním človek-stroj) pre systém je panelové PC s dotykovou obrazovkou pripojené k rozvádzaču
- servopohon získava informáciu o hodnote riadiaceho signálu cez komunikačný protokol Ethernet Powerlink
- informácia o polohe natočenia ramena a kyvadla (získaná z IRC, resp. absolútneho kapacitného snímača) sa digitalizuje v A/D prevodníku v rámci vzdialeného I/O zariadenia a preposiela sa do riadiaceho jadra RexCore, ktoré pracuje na platforme ALIX pod OS Linux s nadstavbou Xenomai
- REX realizuje riadiaci algoritmus použitím dvojsúborovej konfigurácie:
- exec.mdl – hlavný (výkonný) súbor konfigurácie – definuje cieľovú platformu, pre ktorú sa bude konfigurácia prekladať, periódu vzorkovania algoritmu (tick), vstupno-výstupné ovládače a jednotlivé úlohy riadiaceho algoritmu
- xxx.mdl – súbor, ktorý predstavuje vlastný riadiaci algoritmus modelovaný pomocou blokov knižnice RexLib; každý nový riadiaci algoritmus je pred spustením potrebné prekompilovať na .rex súbor
- k dispozícii je vizualizácia vytvorená v jazyku Java na báze open-source knižnice Java3D: pohyblivý 3D model na obrazovke v reálnom čase kopíruje pozíciu reálneho modelu a umožňuje pohľad z ľubovoľného uhla
Užívateľ si vyberá z dvoch dostupných režimov práce:
- demonštračný režim – obsahuje preddefinovanú postupnosť riadiacich algoritmov (výšvih kyvadla z dolnej do hornej polohy, stabilizácia v hornom aj dolnom rovnovážnom stave a sledovanie danej polohy ramena
- režim riadený užívateľom – umožňuje používateľovi zvoliť si požadované natočenie ramena a druh riadenia
Riadiace vstupy
- požadovaná rýchlosť otáčania ramena
Snímané výstupy
- aktuálna poloha natočenia ramena – α
- aktuálna poloha natočenia kyvadla – β
- aktuálna rýchlosť otáčania ramena – α‘
Štruktúra modelu
- použitý matematicko-fyzikálny model je tvorený 2 rovnicami:
- vnútorný rýchlostný regulátor servopohonu aproximovaný pomocou systému prvého rádu, ktorého vstupom je požadovaná rýchlosť otáčania ramena
- pohybová rovnica kyvadla daná ako nelineárna závislosť výchylky kyvadla od zrýchlenia ramena
všetky subsystémy, ktorých názov začína na Simulation_, prekladač RexComp ignoruje, t.j. možno využiť rovnaký algoritmus (jeden súbor) pre simuláciu, ako aj pre vygenerovanie konfiguračného súboru .rex pro cieľovú platformu
predmety
- Simulačné systémy (2. ročník Bc. štúdia)
- Optimálne a nelineárne systémy (1. ročník Ing. štúdia)
- Riadenie a umelá inteligencia (1. ročník Ing. štúdia)
bakalárske práce
2018
- CIMBOROVÁ, Karin: Implementácia výsledkov matematického modelovania fyzikálnych systémov do Výskumného laboratória nelineárnych podaktuovaných systémov s využitím moderných simulačných nástrojov(vedúci BP: Ing. Slávka Jadlovská, PhD) – 2018
- DURKÁČ, Martin: Embedded systémy ako riadiace systémy pre kráčajúci robot a iné fyzikálne systémy a ich implementácia do architektúry DSR(vedúci BP: Ing. Slávka Jadlovská, PhD) – 2018
2017
- KORKOBCOVÁ, Simona: Programové moduly pre analýzu, modelovanie a riadenie nelineárnych podaktuovaných dynamických systémov(vedúci BP: Ing. Slávka Jadlovská, PhD) – 2017
- MARGA, Igor: Návrh programovej aplikácie pre modelovanie, simuláciu a riadenie podaktuovaného systému žeriav v programovom prostredí MATLAB(vedúci BP: Ing. Slávka Jadlovská, PhD) – 2017
2016
- ANDORKO, Patrik: Optimálne riadenie podaktuovaných mechanických systémov(vedúci BP: Ing. Slávka Jadlovská, PhD) – 2016
- GAŽÍK, Peter: Aplikácia simulačných nástrojov v modelovaní a riadení podaktuovaných mechanických systémov(vedúci BP: Ing. Slávka Jadlovská, PhD) – 2016
2015
- KOSKA, Lukáš: Modelovanie, simulácia a riadenie nelineárnych mechanických systémov.(vedúci BP: prof. Ing. Ján Sarnovský, CSc., konzultant BP: Ing. Slávka Jadlovská) – 2015
- TÓTH, Samuel: Návrh programových modulov pre analýzu a riadenie nelineárnych dynamických systémov.(vedúci BP: prof. Ing. Ján Sarnovský, CSc., konzultant BP: Ing. Slávka Jadlovská) – 2015
2014
- KAJŇAK, Ondrej: Programové nástroje pre modelovanie a riadenie mechatronických systémov.(vedúci BP: prof. Ing. Ján Sarnovský, CSc., konzultant BP: Ing. Slávka Jadlovská) – 2014
- KENTOŠ, Matej: Modelovanie a riadenie podaktuovaných mechanických systémov.(vedúci BP: prof. Ing. Ján Sarnovský, CSc., konzultant BP: Ing. Slávka Jadlovská) – 2014
2013
- SLEZÁK, Martin: Využitie programového prostredia MATLAB/Simulink a SimMechanics v matematicko-fyzikálnom modelovaní mechanických systémov (vedúci BP: prof. Ing. Ján Sarnovský, CSc., konzultant BP: Ing. Slávka Jadlovská) – 2013
- VOJTEK, Jaroslav: Modelovanie a riadenie inverzných kyvadiel I. (vedúci ZP: prof. Ing. Ján Sarnovský, CSc., konzultant ZP: Ing. Slávka Jadlovská) – 2013
- VOŠČEK, Dominik: Modelovanie a riadenie inverzných kyvadiel II.(vedúci ZP: prof. Ing. Ján Sarnovský, CSc., konzultant ZP: Ing. Slávka Jadlovská) – 2013
diplomové práce
2017
- KOSKA, Lukáš: Metódy a algoritmy optimálneho riadenia s aplikačným využitím pre nelineárne podaktuované systémy (vedúci DP: Ing. Slávka Jadlovská, PhD) – 2017
- SZUROS, Štefan: Virtualizácia dynamických systémov v 3D prostredí na báze OpenGL (vedúci DP: doc. Ing. Jadlovská, Anna, PhD.) – 2017
- TÓTH, Samuel: Simulácia kinematických a dynamických modelov plne aktuovaných a podaktuovaných robotických systémov (vedúci DP: Ing. Slávka Jadlovská, PhD) – 2017
2016
- ŠARNÍKOVÁ, Alžbeta: Riešenie optimalizačných úloh a ich využitie v prediktívnom riadení (vedúci DP: Ing. Slávka Jadlovská, PhD) – 2016
- KENTOŠ, Matej: Návrh softvérových nástrojov pre analýzu a riadenie nelineárnych podaktuovaných systémov (vedúci DP: doc. Ing. Anna Jadlovská, PhD, konzultant DP: Ing. Slávka Jadlovská, PhD) – 2016
2015
- VOJTEK, Jaroslav: Modelovanie a optimálne riadenie nelineárnych mechatronických systémov. (vedúci DP: prof. Ing. Ján Sarnovský, CSc., konzultant DP: Ing. Slávka Jadlovská) – 2015
- VOŠČEK, Dominik: Metódy a algoritmy pre modelovanie a riadenie podaktuovaných systémov. (vedúci DP: prof. Ing. Ján Sarnovský, CSc., konzultant DP: Ing. Slávka Jadlovská) – 2015
2011
- JADLOVSKÁ, Slávka: Modeling and Optimal Control of Inverted Pendula Systems (vedúci ZP: prof. Ing. Ján Sarnovský, CSc., konzultant ZP: Ing. Ľuboš Popovič, PhD.) – 2011
Projekty
- Implementácia výsledkov vedeckého výskumu v oblasti modelovania a simulácie kyberfyzikálnych systémov do výučby – tvorba moderných vysokoškolských učebníc (KEGA 072 TUKE – 4/2018)
- Výskumné laboratórium nelineárnych podaktuovaných systémov TUKE FEI-2015-33 (Research laboratory for nonlinear underactuated systems)(1/2017 – 12/2017)
Univerzitný vedecký park Technicom pre inovačné aplikácie s podporou znalostných technológií – II.fáz, kód ITMS:313011D232, spolufinancovaný zo zdrojov Európskeho fondu regionálneho rozvoja, (2015 – 2017), Centrum pre nedeštruktívnu diagnostiku technologických procesov so štandartným softvérovým vybavením pre riadenie a komunikáciu (aktivita 3.1, PP7),- Research Activities of the Center of Modern Control Techniques and Industrial Informatics
- Center for Nondestructive Diagnostics of Technological Processes
- Centrum Moderných Metód Riadenia a Priemyselnej Informatiky na KKUI FEI TU v Košiciach (prezentácia výsledkov medzinárodného projektu základného výskumu ALICE CERN – ALICE KE FEI TU a projektu aplikovaného výskumu TECHNICOM PP7/3.1)
- Univerzitný vedecký park Technicom pre inovačné aplikácie s podporou znalostných technológií, kód ITMS:26220220182, spolufinancovaný zo zdrojov Európskeho fondu regionálneho rozvoja, (2013 – 2015), Centrum pre nedeštruktívnu diagnostiku technologických procesov so štandartným softvérovým vybavením pre riadenie a komunikáciu (aktivita 3.1)
dizertačné práce
- JADLOVSKÁ, Slávka: Modelovanie a optimálne riadenie nelineárnych podaktuovaných dynamických systémov (školiteľ: prof. Ing. Ján Sarnovský, CSc.) – 2015
- Vošček, Dominik: Hybridné modely kyber-fyzikálnych systémov a ich aplikácia v rámci distribuovaného systému riadenia, (školiteľ: doc. Ing. Anna Jadlovská, PhD.) – 2019
- Koska, Lukáš: ávrh metodiky pre modelovanie a simuláciu efektívne kráčajúcich robotických systémov s využitím moderných softvérových nástrojov a jej integrácia do distribuovanej riadiacej štruktúry (školiteľ: doc. Ing. Anna Jadlovská, PhD.) – 2021
publikácie
2019
KOSKA, L., JADLOVSKÁ, S., VOŠČEK, D., JADLOVSKÁ, A.: INVERTED PENDULUM WITH LINEAR SYNCHRONOUS MOTOR SWING UP USING BOUNDARY VALUE PROBLEM.In: Acta Polytechnica , Vol. 59, no. 5 (2019) – ISSN 1210-2709
2017
Jadlovská, S., Vošček, D.: Research Laboratory of Nonlinear Underactuated Systems, Mechatronics 4.0 in Education – International Seminar on Internet of Things, Digitalization, Industry 4.0, Cyber-physical Systems and Mechatronics Education, Kodaň – 20-21.6.2017
JADLOVSKÁ, S. – KOSKA, L. – KENTOS, M. . MATLAB-based Tools for Modelling and Control of Underactuated Mechanical Systems In: Transactions on Electrical Engineering. Vol. 6, No. 3 (2017), p. 56-61. – ISSN 1805-3386 Spôsob prístupu: www.transoneleng.org. (ADE)
VOŠČEK, D.: Contribution to hybrid models of cyber-physical systems and their implementation into distributed control system In: SCYR 2017., Košice : TU, 2017 pp. 62-63. – ISBN 978-80-553-3162-1, (AFD)
2016
JADLOVSKÁ, A. – JADLOVSKÁ, S. – VOŠČEK, D.: Cyber-physical system implementation into the distributed control system In: ScienceDirect: IFAC-PapersOnLine. – Amsterdam : Elsevier, 2016 Vol. 49, no. 25 (2016), p. 031-036., ISSN 2405-8963
JADLOVSKÝ, J. – JADLOVSKÁ, A. – JADLOVSKÁ, S. – ČERKALA, J. – KOPČÍK, M. – ČABALA, J. – ORAVEC, M. – VARGA, M. – VOŠČEK, D.: Research Activities of the Center of Modern Control Techniques and Industrial Informatics In: SAMI 2016. – Danvers : IEEE, 2016 S. 279-285. – ISBN 978-1-4673-8739-2, (AFD)
- 2015
- JADLOVSKÁ, S. – SARNOVSKÝ, J. – VOJTEK, J. – VOŠČEK, D.: Advanced Generalized Modelling of Classical Inverted Pendulum Systems In: Advances in Intelligent Systems and Computing. – Switzerland : Springer, 2015 Vol. 316, no. 1 (2015), p. 255-264. – ISSN 2194-5357 (ADM)
- JADLOVSKÁ, S. – KENTOŠ, M.- KOSKA, L. – SARNOVSKÝ, J.: Program Tools for Modeling and Control of Underactuated Mechanical Systems In: Technical Computing Prague 2015. – Prague : University of Chemistry and Technology, 2015 P. 1-9. – ISBN 978-80-7080-936-5 – ISSN 2336-1662, (AFC)
- JADLOVSKÁ, S.: A Final Look Back at Underactuated Mechanical Systems In: SCYR 2015. – Košice : TU, 2015 S. 150-152. – ISBN 978-80-553-2130-1, (AFD)
2014
JADLOVSKÁ, S.: Underactuated mechanical systems: recent findings and future challenges In: SCYR 2014 : 14th Scientific Conference of Young Researchers : proceedings from conference : May 20th, 2014, Herľany, Slovakia. – Košice : TU, 2014 S. 275-276. – ISBN 978-80-553-1714-4 (AFD)
JADLOVSKÝ, J. – JADLOVSKÁ, A. – SARNOVSKÝ, J. – ZOLOTOVÁ, I. – JADLOVSKÁ, S. – PAPCUN, P. – ČERKALA, J. – KOPČÍK, M.- ČABALA, J. – ORAVEC, M. – ČOPÍK, M.: Center for Nondestructive Diagnostics of Technological Processes, In: University Science Park TECHNICOM. – Košice : TU, 2014 S. 1-1. – ISBN 979-80-8086-240-4 (AFL)
2013
JADLOVSKÁ, S. – SARNOVSKÝ, J.: A complex overview of modeling and control of the rotary single inverted pendulum system In: Advances in Electrical and Electronic Engineering. Vol. 11, no. 2 (2013), p. 73-85. – ISSN 1336-1376 (ADM)
JADLOVSKÁ, S. – SARNOVSKÝ, J.: Modelling of Classical and Rotary Inverted Pendulum Systems – a Generalized Approach In: Journal of Electrical Engineering. Roč. 64, č. 1 (2013), s. 12-19. – ISSN 1335-3632 Spôsob prístupu: http://iris.elf.stuba.sk/JEEEC/data/pdf/1_113-2.pdf. (ADN)
JADLOVSKÁ, A. – JADLOVSKÁ, S.: Moderné metódy modelovania a riadenia nelineárnych systémov,1. vyd – Košice : elfa – 2013. – 257 s.. – ISBN 978-80-8086-228-2. (AAB)
JADLOVSKÁ, S. – SARNOVSKÝ, J.: Application of the state-dependent Riccati equation method in nonlinear control design for inverted pendulum systems In: SISY 2013 : IEEE 11th International Symposium on Intelligent Systems and Informatics : proceedings : Subotica, Serbia, September 26-28, 2013. – Subotica : IEEE, 2013 P. 209-214. – ISBN 978-1-4799-0305-4, (AFC)
JADLOVSKÁ, S.: Modeling and Optimal Control of Nonlinear Underactuated Mechanical Systems – a Survey In: SCYR 2013 : Proceedings from conference : 13th Scientific Conference of Young Researchers : May 14th, 2013, Herľany, Slovakia. – Košice : FEI TU, 2013 S. 32 – 35. – ISBN 978-80-553-1422-8 , (AFD)
2012
JADLOVSKÁ, S. – SARNOVSKÝ, J.: Nonlinear Control Design for Inverted Pendulum Systems Based on State-Dependent Riccati Equation Approach. Proceedings of the 5th International Conference on Applied Electrical Engineering and Informatics – AEI 2012, 26. august – 2. september 2012, Kiel, Nemecko, ISBN 978-80-553-1030-5 (AFC).
JADLOVSKÁ, S.: Swing-up and Stabilizing Control of Classical and Rotary Inverted Pendulum Systems. Proceedings of the 12th Scientific Conference of Young Researchers – SCYR 2012, 15. máj 2012, Herľany, Slovenská republika, pp. 38-41, ISBN: 978-80-553-0943-9 (AFD).
JADLOVSKÁ, S. – SARNOVSKÝ, J.: A Complex Overview of the Rotary Single Inverted Pendulum System. Proceedings of the 9th International Conference – ELEKTRO 2012, 21.-22. máj 2012, Žilina – Rajecké Teplice, Slovenská republika, pp. 305-310, ISBN: 978-1-4673-1178-6 (AFD).
JADLOVSKÁ, S. – SARNOVSKÝ, J.: Classical Double Inverted Pendulum – a Complex Overview of a System. Proceedings of the IEEE 10th Jubilee International Symposium on Applied Machine Intelligence and Informatics – SAMI 2012, 26.-28. január 2012, Herľany, Slovenská republika, pp. 103-108, ISBN: 978-1-4577-0195-5 (AFD).
2011
JADLOVSKÁ, S. – SARNOVSKÝ, J.: An Extended Simulink Library for Inverted Pendula Modeling and Simulation. 19th Annual Conference Proceedings of the International Scientific Conference – Technical Computing Prague 2011, 8. november 2011, Kongresové centrum ČVUT Praha, Česká republika, ISBN 978-80-7080-794-1 (AFC).
JADLOVSKÁ, S. – SARNOVSKÝ, J.: Matlab-Based Tools for Analysis and Control of Inverted Pendula Systems. Electrical Engineering and Informatics 2: Proceeding of the Faculty of Electrical Engineering and Informatics of the Technical University of Košice. – Košice, FEI TU, 2011. pp. 403-408, ISBN 978-80-553-0611-7 (AED).
2010
JADLOVSKÁ, S. – JADLOVSKÁ, A.: Inverted Pendula Simulation and Modeling – a Generalized Approach. Proceedings of the 9th International Scientific – Technical Conference on Process Control – ŘÍP 2010, 7.-10. jún 2010, Univerzita Pardubice, Česká republika, ISBN 978-80-7399-951-3 (AFC).
2009
JADLOVSKÁ, S. – JADLOVSKÁ, A.: A Simulink Library for Inverted Pendula Modeling and Simulation. 17th Annual Conference Proceedings of the International Scientific Conference – Technical Computing Prague 2009, 19. november 2009, Kongresové centrum ČVUT Praha, Česká republika, pp. 45, ISBN 978-80-7080-733-0 (AFC).

