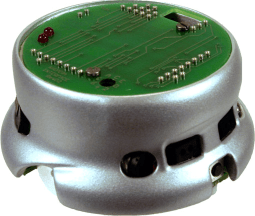
- miniatúrny mobilný robot s diferenciálnym podvozkom, ktorý je zložený z dvoch nezávislé riadených kolieskach a jedného neriadeného kolieska pre stabilitu robota
- modulárny a to ako na softvérovej tak i na hardverovej úrovni
- knižnica aplikácii pre riadenie mobilného robota
- podpora viacerých vývojových prostredí – C, Matlab, SysQuake LabVIEW, akékoľvek iné schopné komumikácie cez sériový port
- vhodný pre štúdium a experimenty súvisiace s teóriou riadenia systémov, navigácie, multiagentových systemov a pod
- Simulačný model je inšpirovaný reálnym modelom Khepera II
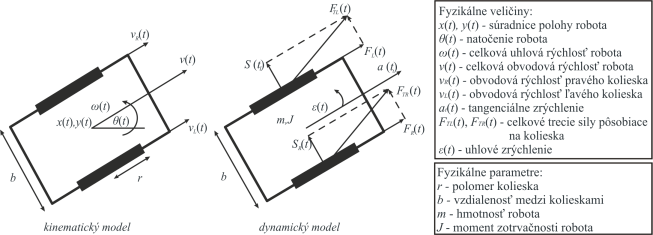
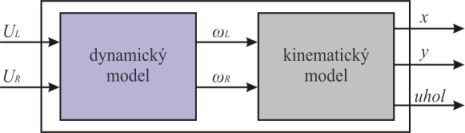
- Model mobilného robota je rozdelený na dva podsystémy a to podsystém kde je popísaný kinematický model a podsystém kde je poísaný dynamický model.
- Kinematický model umožňuje určiť pozíciu x, y a natočenie θ mobilného robota a to pod podmienkou že je známy počiatočný stav robota a aktuálné rýchlosti vL, vR pre oba kolieska.
- Dynamický model zahŕňa trecie sily FL, FR, ktoré pôsobia na kolieska a celkovú hmotnost robota m
- Model je naprogramovaný v prostredí Matlab Simulink
Riadiace vstupy
- vstupné napätia UL, UR
Merané výstupy
- pozícia robota x, y a jeho natočenie θ
predmety
- Simulačné systémy (2.ročník Bc. štúdia)
- Riadenie a umelá inteligencia (1.ročník Ing. štúdia)
riešené bakalárske práce
- 2015
- KLEIN, Tomáš: Modelovanie, simulácia a riadenie dvojkolesového mobilného robota (vedúci BP: doc. Ing. Anna Jadlovská, PhD., konzultant BP: Ing. Jakub Čerkala) – 2015
riešené diplomové práce
- 2015
- TOMČÁK, Matúš: Inteligentné modelovanie a riadenie mobilného robota (vedúci DP:doc. Ing. Anna Jadlovská, PhD., konzultant BP: Ing. Jakub Čerkala) – 2015
- 2009
- FIC, Ján: Riadenie mobilného robota Khepera II s využitím metód umelej inteligencie (vedúci a konzultant DP: doc. Ing. Anna Jadlovská, PhD.) – 2009
riešené dizertačné práce
- 2017
- Čerkala, Jakub: Modelovanie a riadenie mobilných robotov s vyuzitim neuronovych modelov (školiteľ: doc. Ing. Anna Jadlovská, PhD.) – 2017
- 2012
- ŠUSTER, Peter: Návrh efektívnych softvérových nástrojov pre riadenie a analýzu nelineárnych systémov (školiteľ: doc. Ing. Anna Jadlovská, PhD.) – 2012
publikácie
2014
ČERKALA, J., JADLOVSKÁ, A.: Mobile Robot Dynamic with Friction in Simulink / In: Technical Computing Bratislava 2014 : 22nd Annual Conference Proceedings : Bratislava – 2014 P. 1-10. – ISBN 978-80-7080-898-6.
2011
ŠUSTER, P. – JADLOVSKÁ, A.: Tracking Trajectory of the Mobile Robot Khepera II Using Approaches of Artificial Intelligence, Acta Electrotechnica et Informatica, No.1., Vol.11, 2011, Košice, pp. 38-43, Slovak Republic, ISSN 1335-8243
2010
ŠUSTER, P., JADLOVSKÁ, A.: Neural tracking trajectory of the mobile robot Khepera II in internal model control structure / – 1 elektronický optický disk (CD-ROM). In: Process Control 2010 : 9th International Conference : June 7 – 10, 2010, Kouty nad Desnou, Czech Republic. – Brno : Tribun EU, 2010. – ISBN 978-80-7399-951-3. – P. C153a-1-C153a-13.