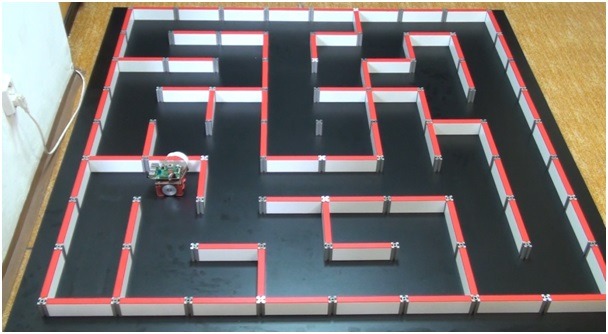
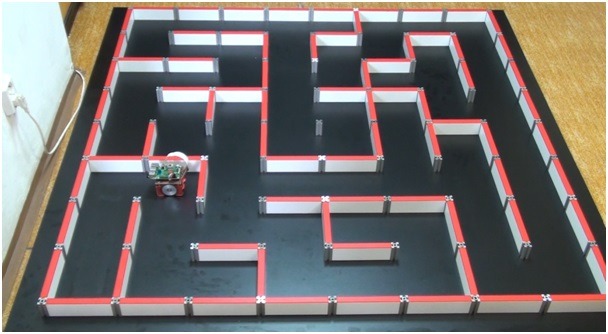
bludisko pre mobilných robotov rozmerov 8 x 8 buniek spĺňajúce štandardné normy „IEE Micromouse Contest“
pravidlá:
- cieľom je dostať sa z štartovacej bunky (roh bludiska) do cieľa (stred bludiska) v čo najkratšom čase
- robot môže cestu vykonať viac krát, počíta sa mu najkratší čas
- robot môže stráviť v bludisku najviac 5 minút, počas nich môže absolvovať najviac 10 pokusov
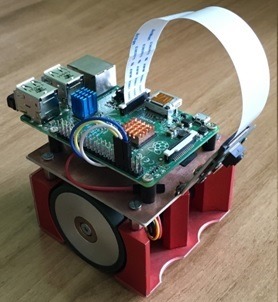
obmedzenia na robota:
- rozmer robota maximálne 16cm x 16 cm
- autonómne hľadanie cieľa
- robot nesmie počas cesty bludiskom nikde nič odložiť ani stratiť
- nesmie používať zdroj energie využívajúci spaľovací proces
predmety
- Jednočípové mikropočítače (2.ročník Bc. štúdia)
riešené bakalárske práce
2017
- KONTUĽ, Juraj: Návrh a realizácia riadiaceho systému mobilných robotov na báze systému ROS pre pohyb robota v bludisku (vedúci ZP: doc. Ing. Ján Jadlovský, CSc., konzultant ZP: Ing. Jaroslav Socháň)
- DZIAK, Patrik: Embedded systémy a ich implementácia pri riadení mobilných robotov v súlade s konceptom Industry 4.0. (vedúci ZP: doc. Ing. Ján Jadlovský, CSc., konzultant ZP: Ing. Jaroslav Socháň)
2016
- FOLTIN, Gustáv: Riadenie pohybu mobilného robota v bludisku na základe obrazu z kamery (vedúci ZP: doc. Ing. Ján Jadlovský, CSc., konzultant ZP: Ing. Michal Kopčík)
2015
- SEGIŇÁKOVÁ, Simona: Vytvorenie funkcie na mapovanie bludiska a hľadanie najkratšej cesty (vedúci ZP: doc. Ing. Ján Jadlovský, CSc., konzultant ZP: Ing. Michal Kopčík)
- MODLA, Dalibor: Návrh a realizácia funkcií pre riadenie pohybu mobilného robota v bludisku (vedúci ZP: doc. Ing. Ján Jadlovský, CSc., konzultant ZP: Ing. Michal Kopčík)
riešené diplomové práce
2017
- KLEIN, Tomáš: Implementácia riadiacich algoritmov pre mobilné roboty s diferenciálnym kolesovým podvozkom (vedúci ZP: doc. Ing. Anna Jadlovská, PhD., konzultant ZP: Ing. Jakub Čerkala)
2016
- FOLTIN, Gustáv: Systém riadenia mobilného robota v bludisku (vedúci ZP: doc. Ing. Ján Jadlovský, CSc., konzultant ZP: Ing. Jaroslav Socháň)
riešené dizertačné práce
- ČERKALA, Jakub: Modelovanie a riadenie mobilných robotov s využitím neurónových modelov, FEI TU 2017, (školiteľ: doc. Ing. Jadlovská, A. PhD.)
- KOPČÍK, Michal: Vytvorenie metodiky pre diagnostiku senzorických systémov v rámci distribuovaného systému riadenia so zameraním na mobilnú robotiku, FEI TU, 2018, (školiteľ: doc. Ing. Jadlovský, J., CSc.)
Publikácie
2017
- ČERKALA, J. – JADLOVSKÁ, A.: Application of neural models as controllers in mobile robot velocity control loop, In: Journal of Electrical Engineering. Roč. 68, č. 1 (2017), s. 39-46. – ISSN 1335-3632 (ADN),
2016
- JADLOVSKÝ, J. – JADLOVSKÁ, A. – JADLOVSKÁ, S. – ČERKALA, J. – KOPČÍK, M. – ČABALA, J. – ORAVEC, M. – VARGA, M. – VOŠČEK, D.: Research Activities of the Center of Modern Control Techniques and Industrial Informatics In: SAMI 2016. – Danvers : IEEE, 2016 S. 279-285. – ISBN 978-1-4673-8739-2 , (AFD)
- ČERKALA, J.: Methodology for the Modelling of Mobile Robot with Differential Chassis / Jakub Čerkala – 2016.In: SCYR 2016. – Košice : TU, 2016 S. 170-171. – ISBN 978-80-553-2566-8 (AFD)
2015
- JADLOVSKÝ, J. – KOPČÍK, M. – SEGIŇÁKOVÁ, S.: Introduction into maze mapping and the shortest path finding. In: Electrical Engineering and Informatics 6 : proceedings of the Faculty of Electrical Engineering and Informatics of the Technical University of Košice. – Košice : FEI TU, 2015 S. 621-625. – ISBN 978-80-553-2178-3. (AED)
- ČERKALA, J. – JADLOVSKÁ, A.: Nonholonomic Mobile Robot with Differential Chassis Mathematical Modelling and Implementation in Simulink with Friction in Dynamics In: Acta Electrotechnica et Informatica. Roč. 15, č. 3 (2015), s. 3-8. – ISSN 1335-8243 , (ADF)
- ČERKALA, J. – JADLOVSKÁ, A.: Dynamics with Friction in Mobile Robot Simulink Model In: Technical Computing Bratislava 2014 Proceedings. – Saarbrücken : Lap Lambert Academic Publishing, 2015 P. 65-81. – ISBN 978-3-659-40792-5 , (AEC)
- ČERKALA, J. – JADLOVSKÁ, A. – SZÜRÖS, Š.: 3D visualization of mechatronic systems using OpenGL, In: Electrical Engineering and Informatics 6 : proceedings of the Faculty of Electrical Engineering and Informatics of the Technical University of Košice. – Košice : FEI TU, 2015 S. 351-356. – ISBN 978-80-553-2178-3 (AED)
- ČERKALA, Jakub – JADLOVSKÁ, Anna – KLEIN, T.: Modeling and Control of Mobile Robot with Differential Chassis, In: Electrical Engineering and Informatics 6 : proceedings of the Faculty of Electrical Engineering and Informatics of the Technical University of Košice. – Košice : TU, 2015 S. 656-661. – ISBN 978-80.553-2178-3 , (AED)
- JADLOVSKÁ, A. – ČERKALA, J. – TOMČÁK, M.: Neural Model in Mobile Robot Trajectory Following Task, In: Electrical Engineering and Informatics 6 : proceedings of the Faculty of Electrical Engineering and Informatics of the Technical University of Košice. – Košice : FEI TU, 2015 S. 739-744. – ISBN 978-80-553-2178-3 (AED)
- ČERKALA, J.: Trajectory generator for mobile robot in plane, In: SCYR 2015. – Košice : TU, 2015 S. 322-323. – ISBN 978-80-553-2130-1, (AFD)
2014
- ČERKALA, J.: Modeling and control of robotic systems, In: SCYR 2014 : 14th Scientific Conference of Young Researchers : proceedings from conference : May 20th, 2014, Herľany, Slovakia. – Košice : TU, 2014 S. 217-218. – ISBN 978-80-553-1714-4, (AFD)
- ČERKALA, J. – JADLOVSKÁ, A.: Mobile Robot Dynamic with Friction in Simulink, In: Technical Computing Bratislava 2014 : 22nd Annual Conference Proceedings : Bratislava, 4.11.2014. – Prague : Institute of Chemical Technololgy, 2014 P. 1-10. – ISBN 978-80-7080-898-6 (AFD)
- JADLOVSKÝ, J. – JADLOVSKÁ, A. – SARNOVSKÝ, J. – ZOLOTOVÁ, I. – JADLOVSKÁ, S. – PAPCUN, P. – ČERKALA, J. – KOPČÍK, M.- ČABALA, J. – ORAVEC, M. – ČOPÍK, M.: Center for Nondestructive Diagnostics of Technological Processes, In: University Science Park TECHNICOM. – Košice : TU, 2014 S. 1-1. – ISBN 979-80-8086-240-4 (AFL)